 OpenBionics
OpenBionicsDescription
Recently, we presented a methodology based on computational geometry and set theory methods for quantifying anthropomorphism of robot hands [1]. The idea was simple, to use the human hand as a reference for assessing the humanlikeness of robot and prosthetic hands in terms of both motion capabilities and morphology. This study was motivated by the fact that the objects and the environments surrounding us have been crafted in order to be used by the human hand, nature's most versatile and dexterous end-effector.
For this project we chose to design our prosthetic hand to be as anthropomorphic as possible, in order to maximize also its ability to grasp everyday life objects. For doing so, we used the index of anthropomorphism that we proposed in [1] and which provides a normalized score of human-likeness that ranges between 0 (non-human-like) and 1 (human-identical), together with parametric models derived from hand anthropometry studies [2]. Thus, we managed to conclude to a design that is considered human-like in terms of: 1) the selected finger phalanges lengths and 2) the positioning of the finger base frames.
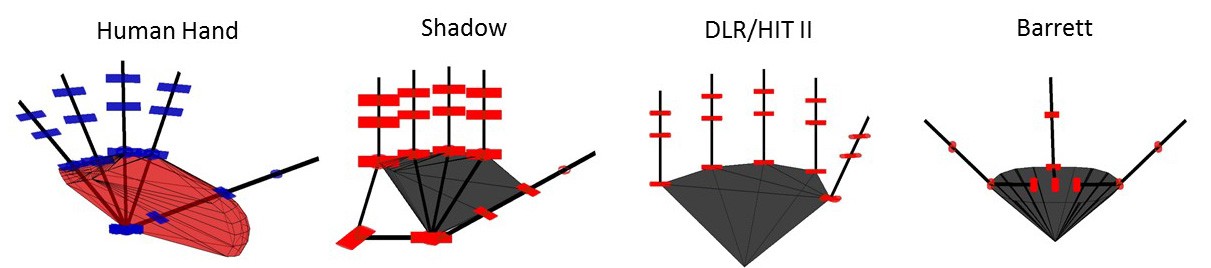
In the following figure, the finger base frames workspaces are depicted for the human and different robot hands.
Another approach / methodology that can be used for the quantification of anthropomorphism of robot and prosthetic hands has been proposed by Feix et al and can be found in [3].
More details can be found at the following URL:
OpenBionics Affordable Prosthetic Hands: Anthropomorphism
References
[1] M. V. Liarokapis, P. K. Artemiadis, and K. J. Kyriakopoulos, “Quantifying anthropomorphism of robot hands,” in IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2013, pp. 2041–2046.
[2] B. Buchholz, T. J. Armstrong, and S. A. Goldstein, “Anthropometric data for describing the kinematics of the human hand,” Ergonomics, vol. 35, no. 3, pp. 261–273, 1992.
[3] T. Feix, J. Romero, C. H. Ek, H. B. Schmiedmayer, and D. Kragic, “A metric for comparing the anthropomorphic motion capability of artificial hands,” IEEE Trans. Robot., vol. 29, no. 1, pp. 82–93, 2013.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.