 Patrick Joyce
Patrick JoyceMyself and Steve both
have ALS. When you've had it for a while, like we have, your health
becomes very fragile. Steve had pneumonia recently, which prevented
him from working on Eyedrivomatic for a month. Last week was my turn.
I can no longer swallow, and for the last two years I have been fed
through a tube in my stomach. Last week I stopped being able to
tolerate the food at all. After three days without food I was rushed
into hospital. The doctors fiddled with my medication, and the
situation improved a little. I am out of hospital now, and feeding
again - enough to keep me alive, though with a distressing amount of
nausea attached. This makes perfecting Eyedrivomatic all the more
urgent. While it works well now, there are too many loose ends for
others to take over easily were I to die unexpectedly. The system
works well, but it needs more fine tuning on the electronic hand, and
time spent making the software more plug and play.
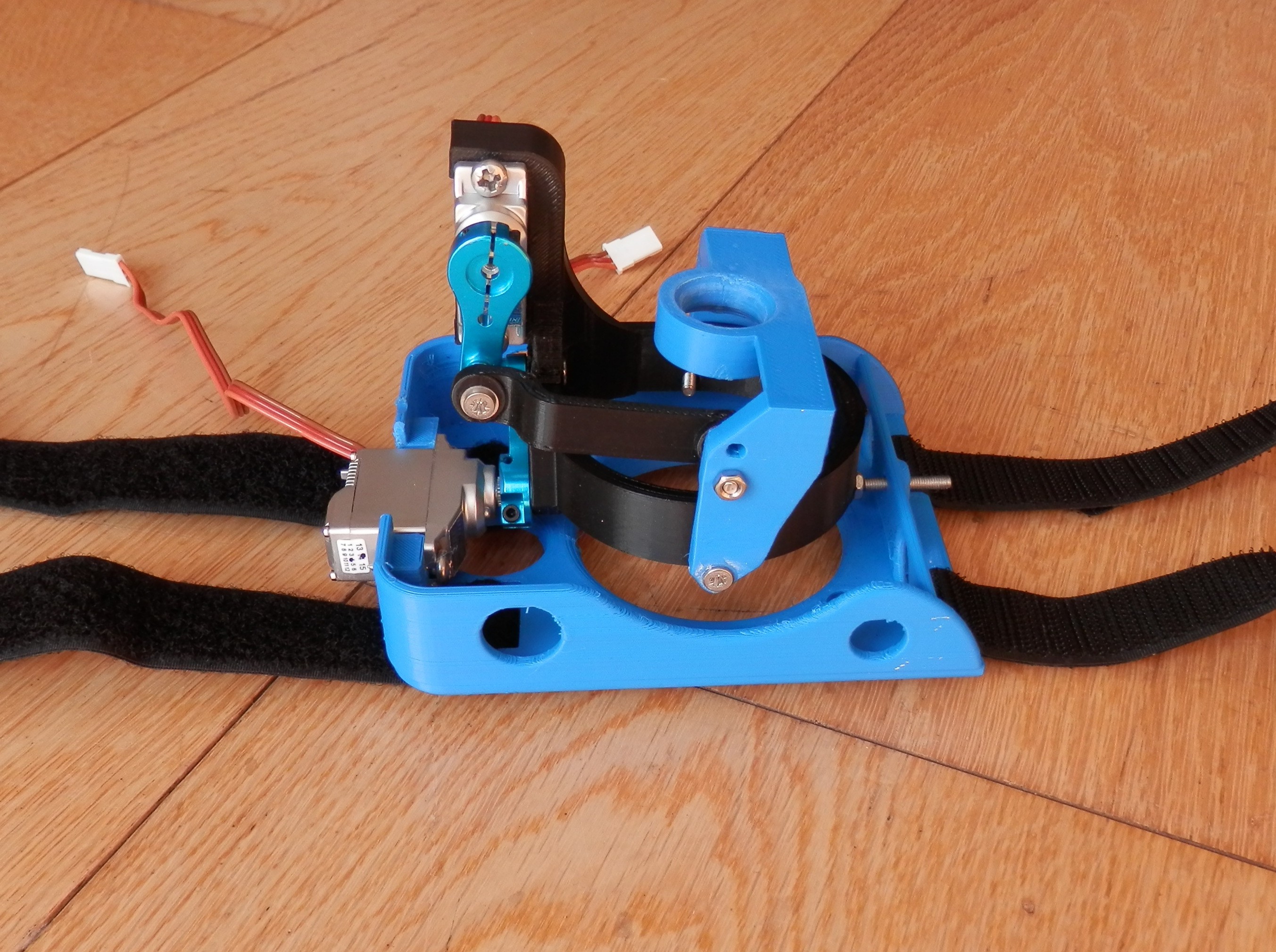
The Mk5 electronic hand is now in it's fifth sub prototype. The left right servo was moving excessively compared to the forwards backwards one, so I redesigned it. I moved the pivot point for the main cradle one centimetre lower, which hopefully will restore the balance between the x and y movement. I'm posting it to Steve for testing today. Meanwhile i'm redesigning it a further time as it's too hard to build at the moment. An easy build process is very important to us, as the end user is unlikely to be an engineer.
We've had a lot of interest from disabled people wanting their own Eyedrivomatic systems. As soon as the Mk5b has proved itself, we'll start producing units for beta testing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.