 Jean-François Duval
Jean-François DuvalBefore I adopted the business naming convention (Plan, Manage & Execute) the motor drivers were named PWR_STG, short for Power Stage. The FlexSEA-Execute 0.1 boards that you can see in most of the pictures is the 3rd prototype generation. How did I start from scratch and end up there?
10/2013: PWR_STG_0_1
Goal(s): to get started! I needed to force myself to work harder, and I needed a platform to test my software.
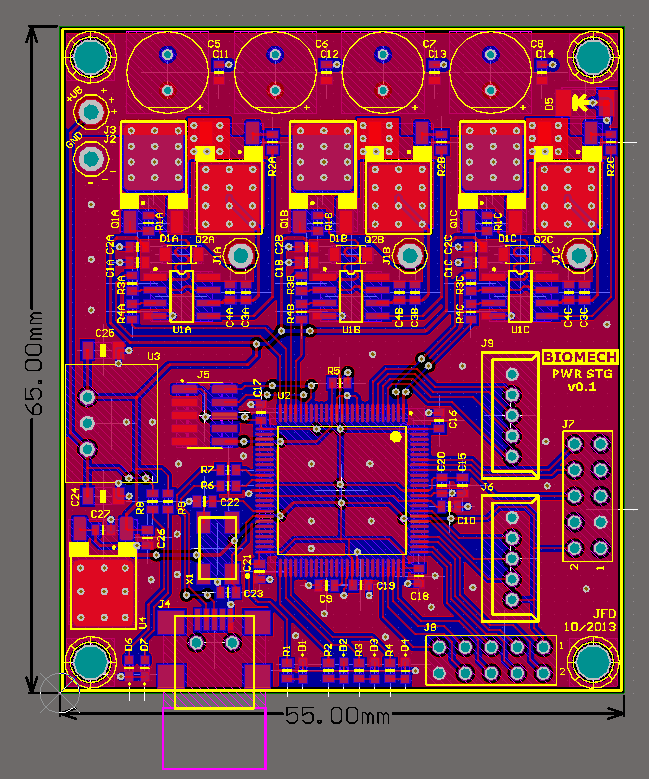
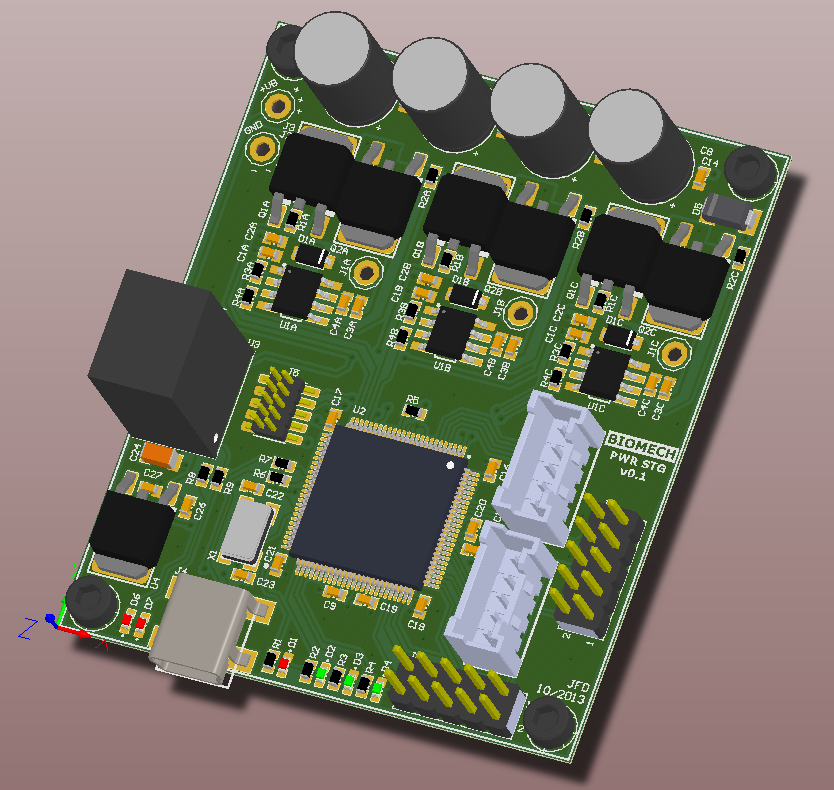
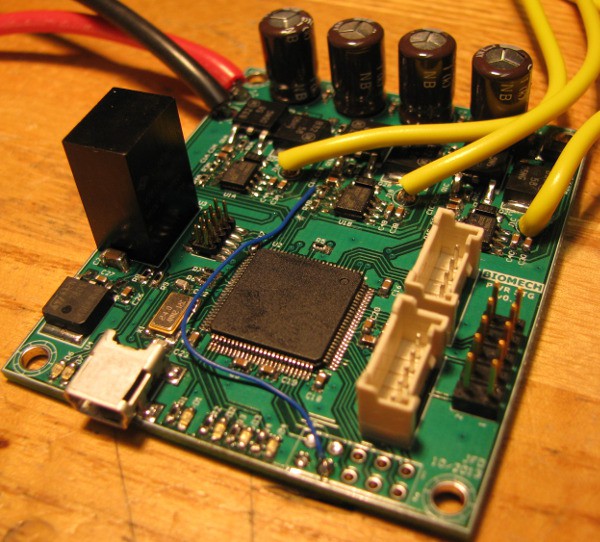
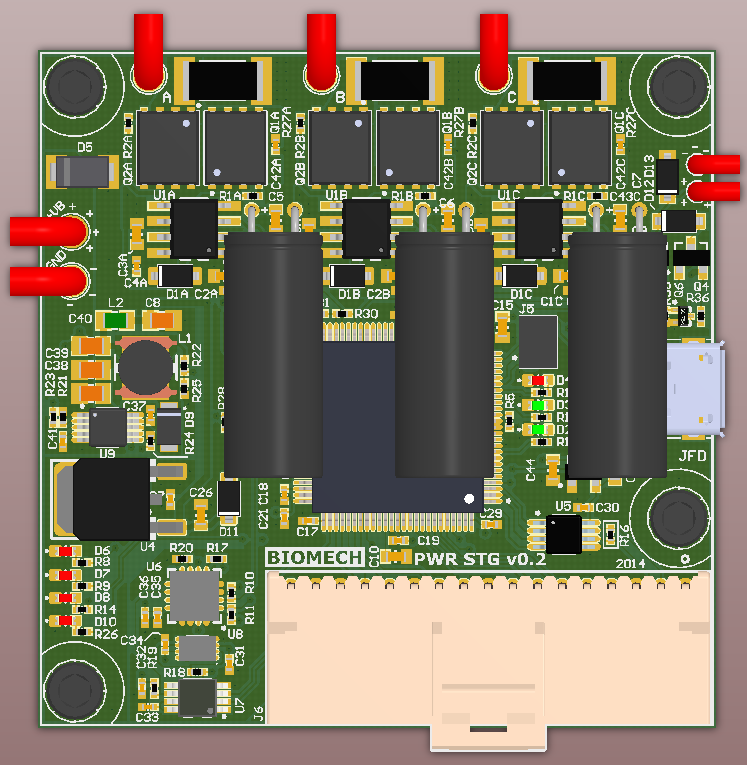
Strategy/details: testing the schematic and my libraries was important. I kept the layout as simple as possible (2 layers, low density) to facilitate hand assembly. Passive components were 0603. The big black box on the left is a V7810, a DC/DC regulator intended to replace the venerable 7810. For the 10V to 5V conversion I was using a linear regulator, LM7805 (that’s the big DPAK package on the left). Connectors were big and un-optimized (motor wires are in the middle of the board). I knew that I couldn’t draw much current from this board, but that was not the point.
| PCB layout - 2D | PCB layout - 3D | Prototype |
 |  |  |
You can read more about this design on my How To Make (almost) Anything pages (I saved time by using my research for weekly assignments). During Week 6: Electronics Design I talk about PSoC selection and design choices, on Week 8: Embedded Programming I have a brief progress report and on Week 11: Output Devices I show a nice demo: “writing” text with a brushless DC motor (including intro to BLDC motors, PID basics, Matlab character generation, 2D plotting, etc).
02/2014: PWR_STG_0_2
Goal(s): add sensor signal processing, communication interface (RS-485), better power supplies and do a more compact layout. This revision had to be close to the end product.
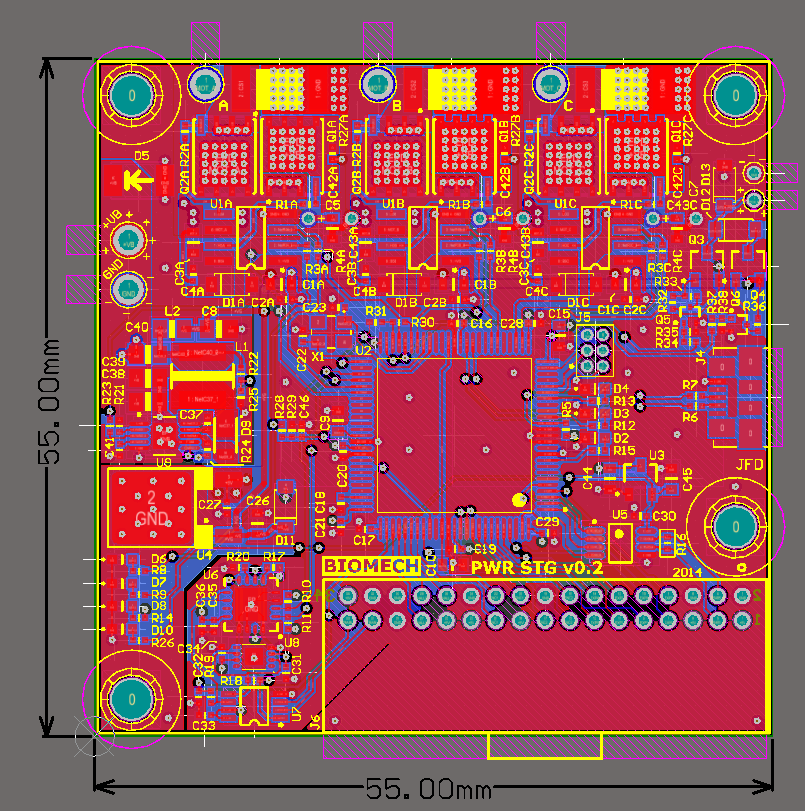
Strategy/details: I did test PCBs for some of the modules (strain gauge amplifier, DC/DC power supply, RS-485 interface) and, after testing, integrated these design modules in the PWR_STG_0_2 project. I picked better components and spent more time on the layout (more compact, better thermal engineering). I kept things simple as I knew I would hand-assemble the first prototypes.
| PCB layout - 2D | PCB layout - 3D | Prototype |
 |  | 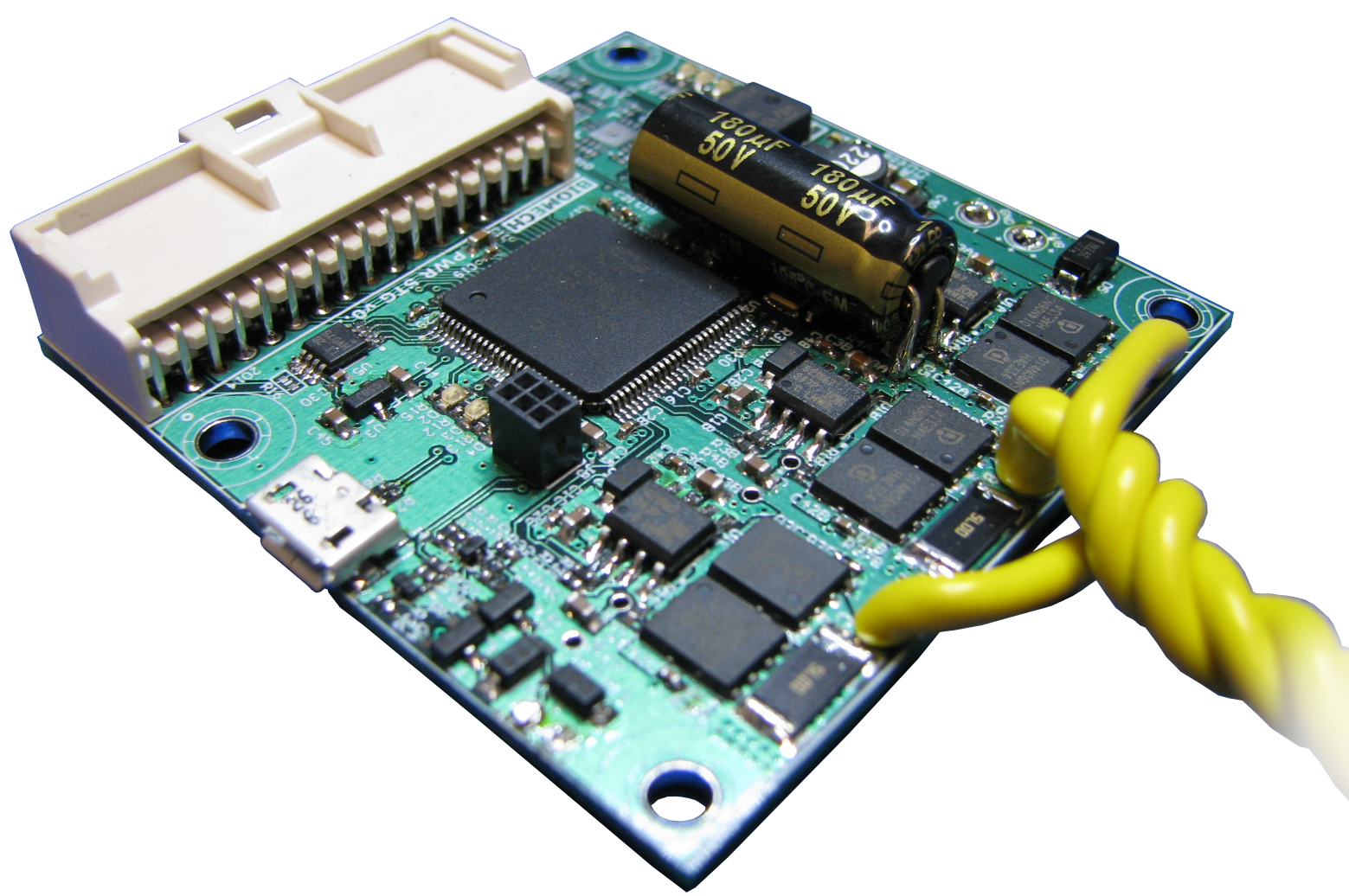 |
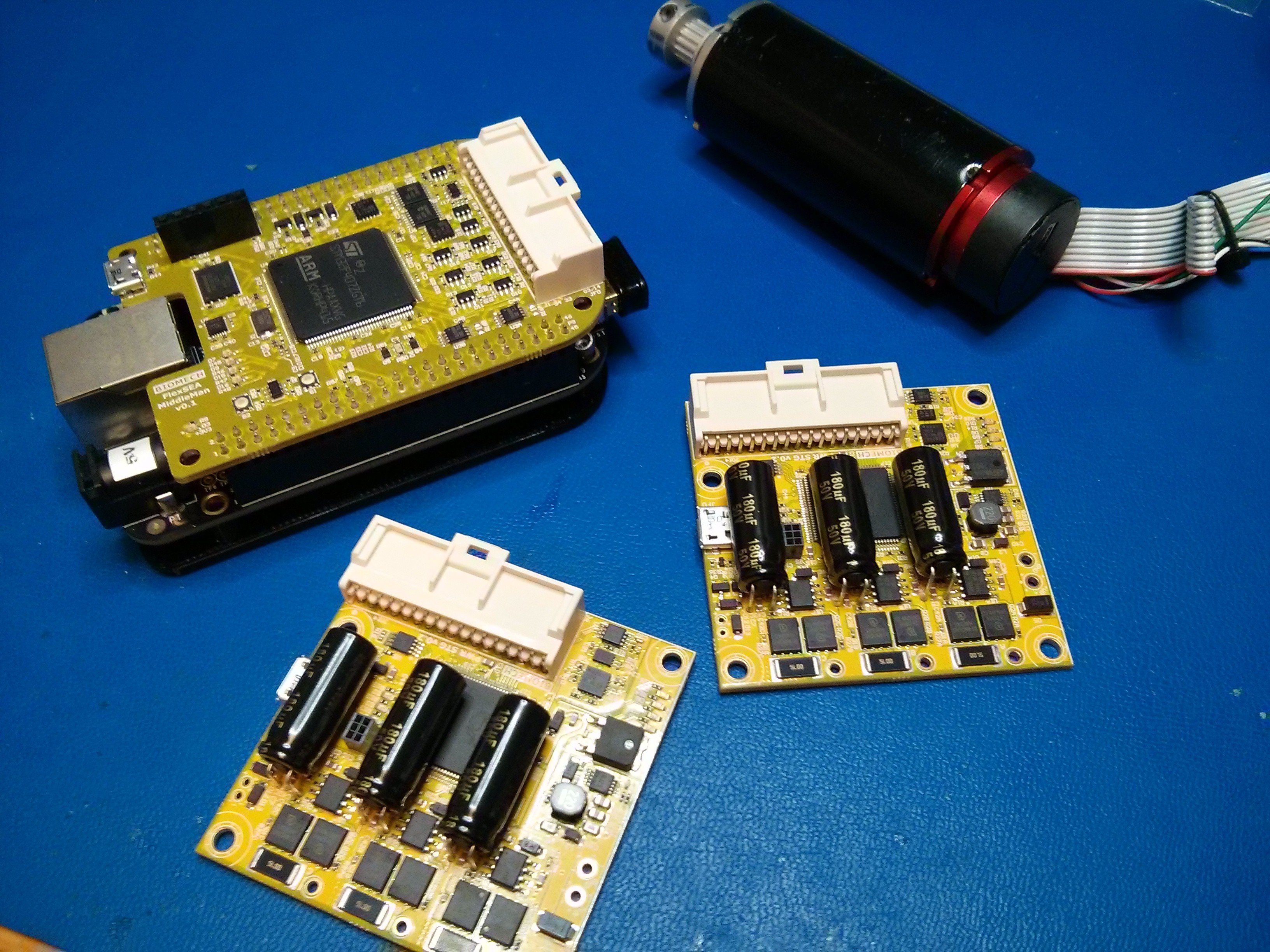
I was really happy when I started using the boards in prosthesis, without any hardware patches! I had Nexlogic build a batch of 10 kits (Middleman, later named Manage, and Execute boards) with a nice yellow soldermask:
11/2014: FlexSEA-Execute 0.1
Goal(s): add safety features, optimize connectors, smaller product, easy to manufacture.
Strategy/details: in this revision I introduced the PSoC 4 safety co-processor, replaced a linear regulator by a DC/DC, fixed the strain gauge amplifier, added shorted-lead protections, selected denser connectors, designed a mounting plate/heatsink, added internal sensing, an IMU, etc… lots of modifications! The PCB is now 6 layers and I have a lot of 0402 and QFN parts, hand-assembly wouldn’t have been reliable (the power plane make it hard) so I outsourced everything to Nexlogic.
| PCB layout - 2D | PCB layout - 3D | Prototype |
 | 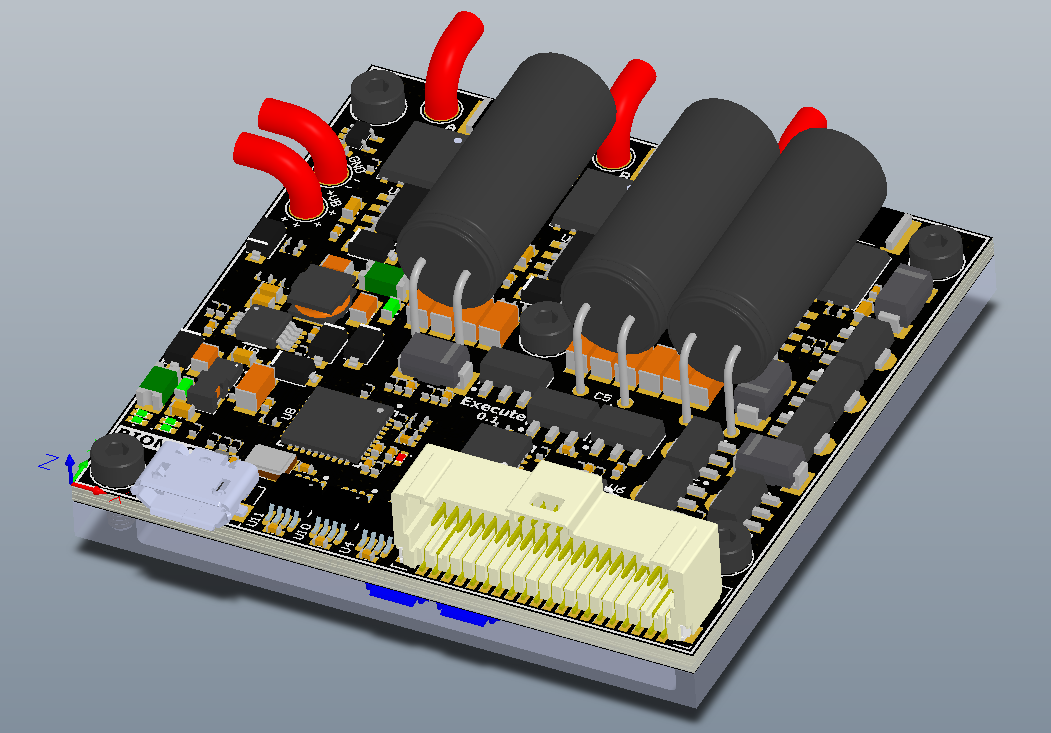 | 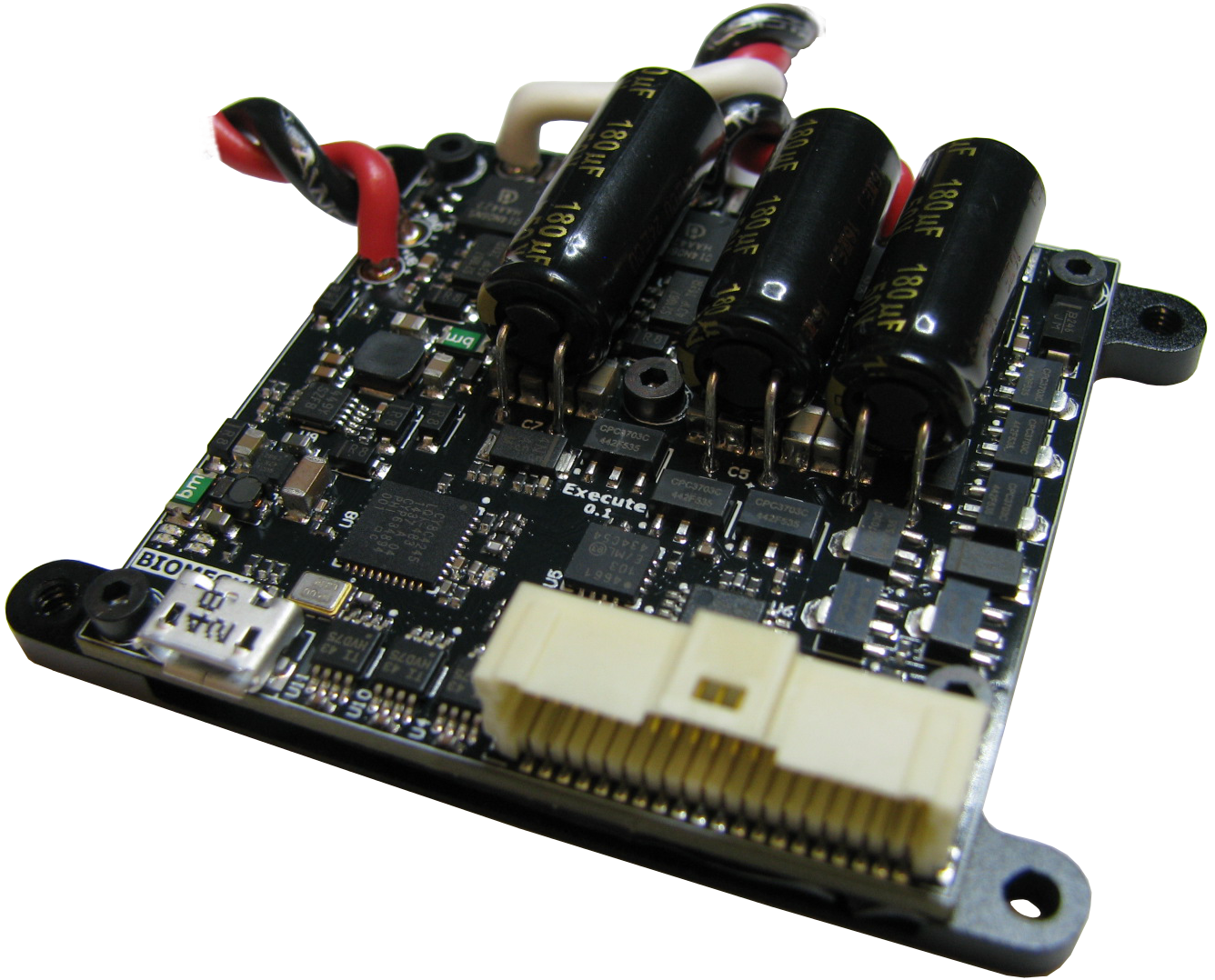 |
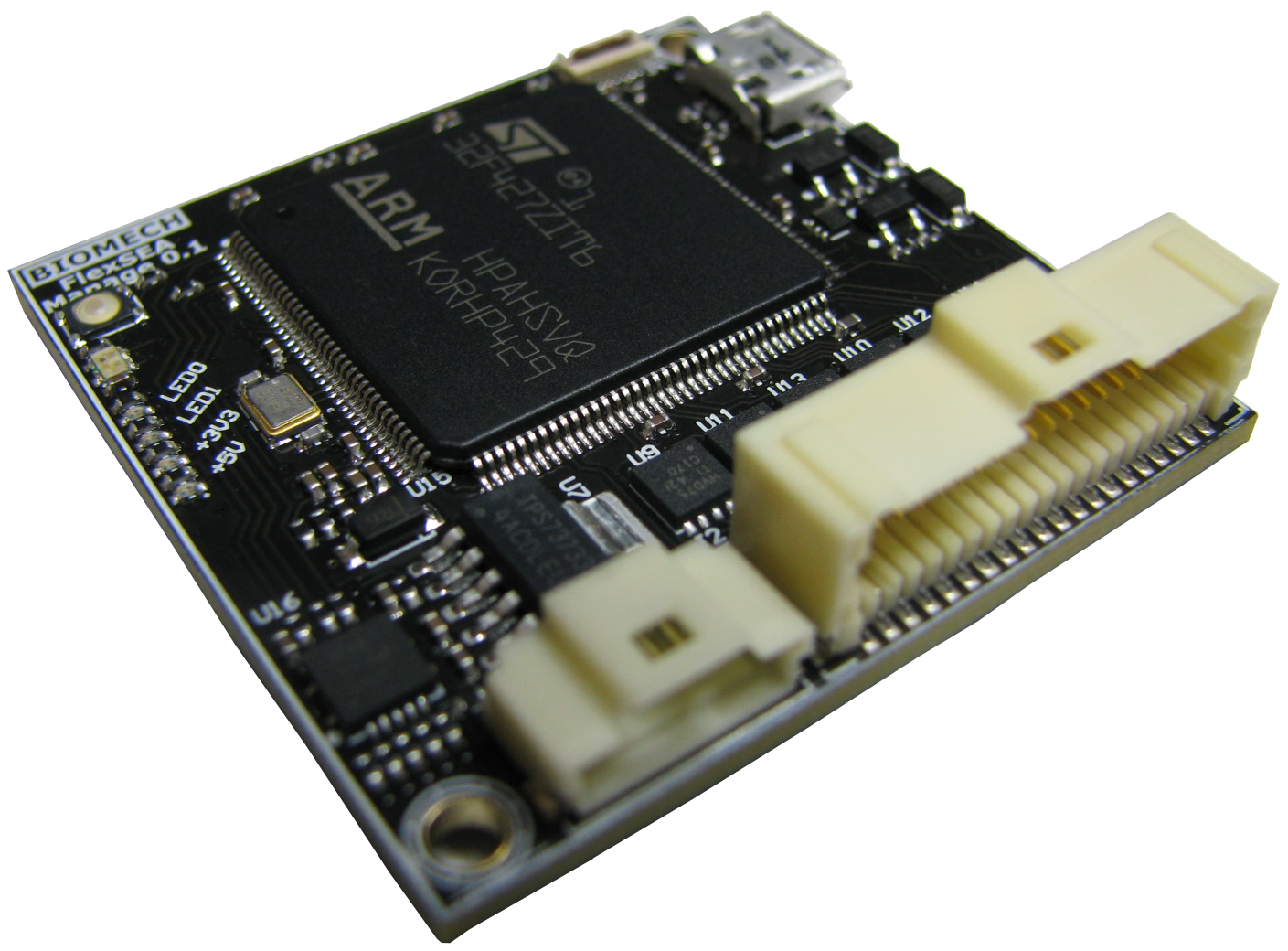
They also produced the Manage 0.1 board (now much much smaller than the Beagle Bone shield that you saw previously!):
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.