 Ossum
OssumDay one was scuppered by lack of appropriate screw drivers, apparently I have all the larger and smaller sizes, but not the one I needed to get the two deeply recessed screws out of his back. Day two was a bust because once I got the right screwdriver I discovered that the head of one of those stubborn screws was already stripped. Day 3 saw my patience run out, so I took him to work and removed the screw's head with a drill. The rest of the disassembly was pretty simple, just careful unclicking of brittle old plastic parts.
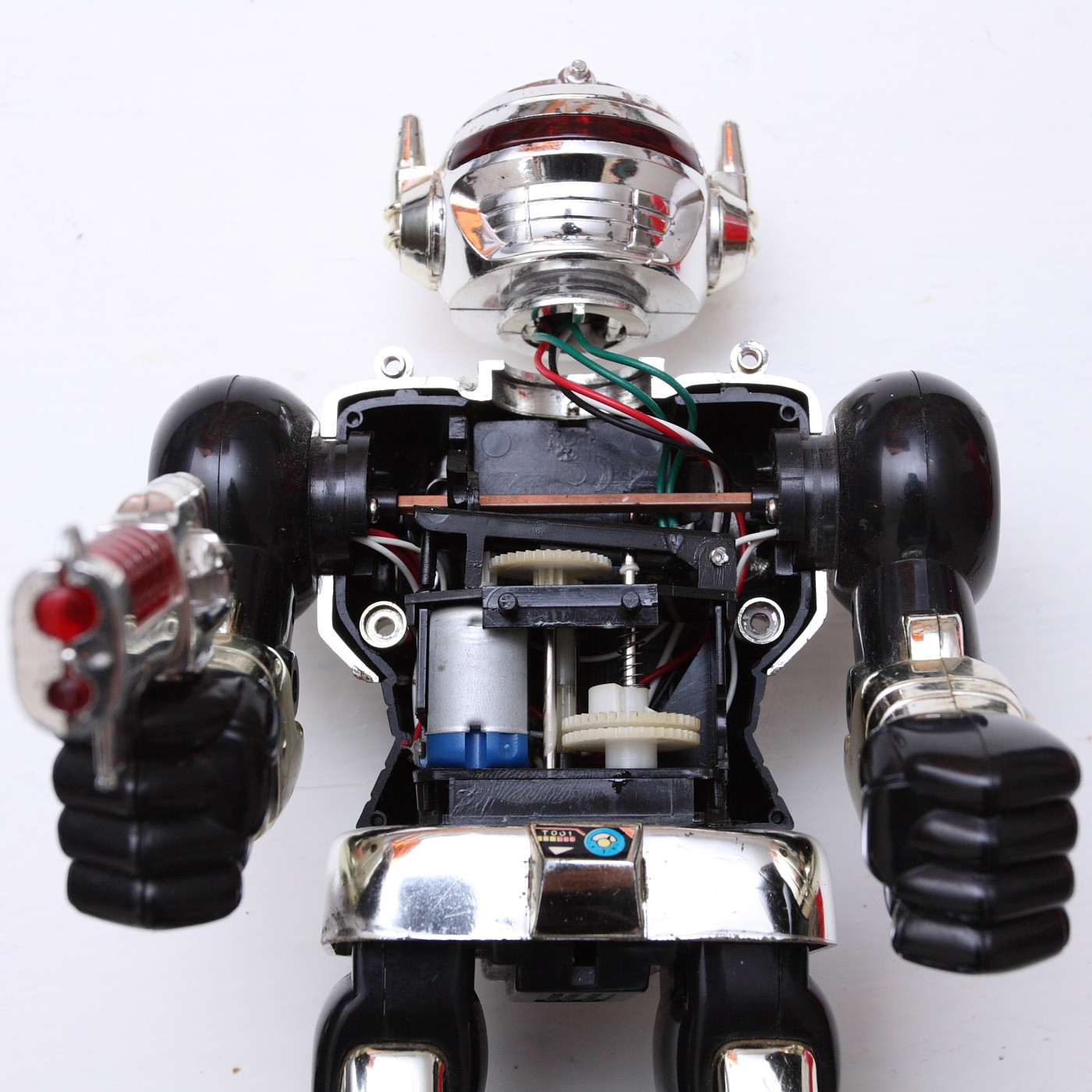
At least one of the reasons that he doesn't move at the moment is that there is a missing gear which should transmit power to the leg assembly.


I now need to figure out how to control the bits and pieces. Ideally I would like to handle torso rotation and arm movement with two servos. The movement of the legs can still be handled by a motor, perhaps the one that is there already, so long as I can replace that gear.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.