 deʃhipu
deʃhipuThe continuous-rotation servos arrived, and I got to finish another of my experiments, which I mentioned previously over at the #Katka, a mammalian robot project. Since I'm re-using parts and experience between all those projects, it becomes harder to separate them. This one might even grow out into its own project, but for now I will publish it here, as it's basically Tote with a slightly different leg configuration and software.
Remember the cute tank-robots from Masamune Shirow's mangas? First Fuchikomas, then Tachikomas. Now, in the newest TV series, there is a new addition to the family called Logicoma. And it's much more, hmm, shall I say "realistically", designed than the others -- in fact, I thought that I might be able to build a model of it out of Tote.
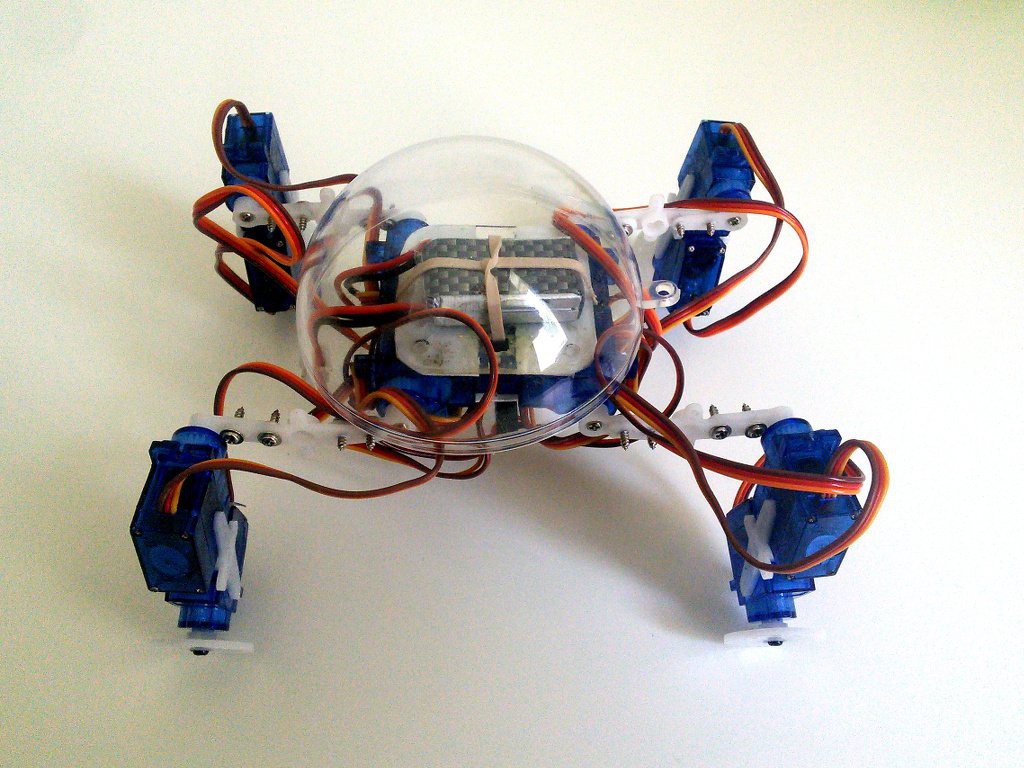
Since with the Arduino Pro Mini I'm limited to 12 servos, I had to find a way to reduce the number of servos and still get proper walking. My experiments with #Katka, a mammalian robot allowed me to do that, so I used the 4 free servo slots for 4 continuous-rotation servos placed at the ends of the legs. I could actually have converted the SG90 servos instead, but I didn't have the round servo horns for the wheels, so I decided to just order ready servos.
For now, just for testing, I have two separate programs, one for just driving forward:
And one for walking forward:
I'm sure I will be able to add a lot more, and also add all the props that will make it look like a real Logicoma, but that's it for a start.
I actually think that there is a lot of promise for this kind of hybrid robots that have both wheels for efficient and fast locomotion over flat terrain, and legs for getting through rough terrain, stairs, and maybe even climbing. If you look at the robots from this year's DARPA Robotics Challenge, many of them have additional wheels on them.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.