 Daniel Wiegert
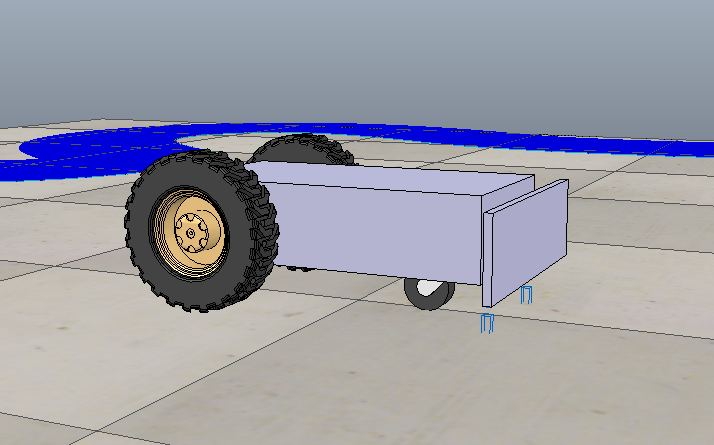
Daniel WiegertI've started to build and try out V-rep http://www.coppeliarobotics.com/ for simulating the new software running in the Landroid. (Btw, its free! Download and try it out yourself, great fun!)
Right now it only can detect a bump, stops, back with a little turn and try forward again. Really Really stupid that is.. :)
My problem is that it's summer here in Sweden right now so I am using the only Landroid I have. Which I have to chase after every evening to put it back in the charger (the original program is really stupid in my opinion, and I also got a quiet complex garden. It does the job tough..)
I have succeeded to flash a Hello World program on it, stupid me didn't think about taking a photo of that milestone though.. :P Now its running a somewhat modified firmware version 0.94 from Worx.
I would really much like to buy me a second Worx Mower (wg790e for example, almost same hardware in them) to do development on. In future we would need a wg795e also (This one has WLAN) but hopefully some more will join my adventure and help me with different models!
If you would like to donate me some money please don't hesitate to contact me! I dont know the policy on this site if it is Ok to beg for money!
//Daniel
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.