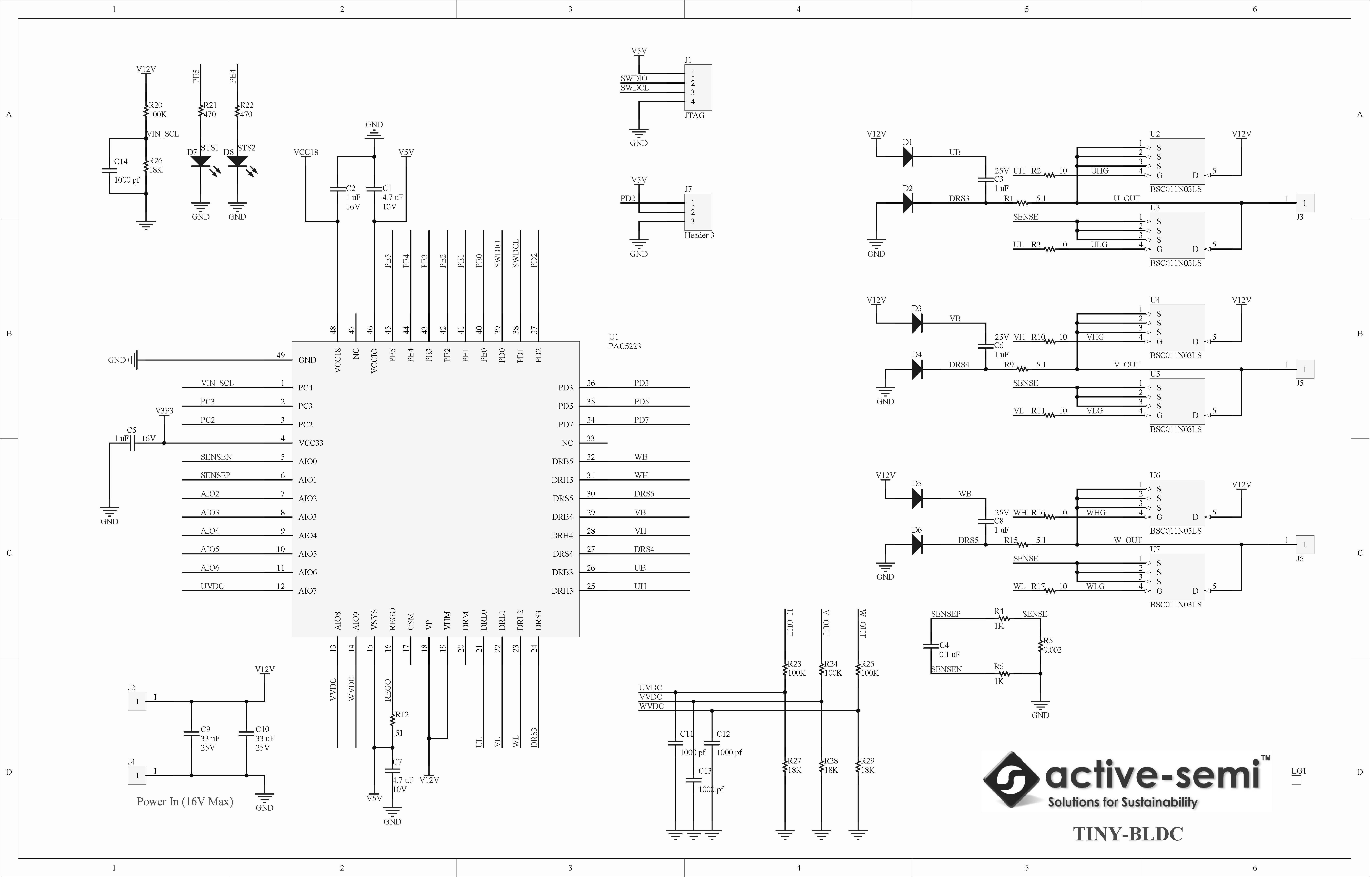
The Tiny BLDC board measures 1.3" x 0.9" (33 mm x 23 mm). The reason why we can make a BLDC motor driver so small is because PAC5223 has pretty much all the circuitry required to drive the power FETs. These components are:
- 3 phase pre drive power stage
- 3 comparators to sense BEMF crossing (Tiny BLDC uses these. Tiny FOC does not need to.)
- 3 differential amplifiers to digitize current and protect against over current (Tiny BLDC uses 1, Tiny FOC uses 3)
- 10 bit ADC to digitize values such as currents, phase voltages and power supply voltage (we will use 1 to digitize battery voltage)
- Up to 14 PWM generators (of which we will use 6 to drive the 3 phase inverter, AKA H Bridge)
- Up to 14 timer Input Captures which can be used to digitize the RC PWM input (we will use 1 of these)
- Four timers (A, B, C and D) to perform timed functions such as control manager, accurate commutation, high speed BEMF Sampling, RC PWM input capture and decoding, and motor PWM generation).
- Dead time generators to ensure the H Bridge doesn't suffer from shoot through.
- Voltage regulators to supply all different loads.
In most ESC's out there, you will find a microcontroller, some voltage regulators, some pre drive ICs and then the FETs, along with a bunch of support passives. With the PAC5223 we have pretty much everything but the FETs.
These are the components (support passives) we still need to add:
- Bootstrap caps and diodes.
- gate drive resistors.
- Output pin protection diode and resistor (optional but recommended).
- SENSE resistor with filtering caps and resistor.
- Phase Outputs voltage divider resistors and filtering cap.
- MCU regulator caps and resistor.
- Battery voltage divider.


 ridonkulus
ridonkulus
 Simone Tolomei
Simone Tolomei
In the description you mention Tiny FOC, is that a FOC capable ESC?