 Matthew Borgatti
Matthew Borgatti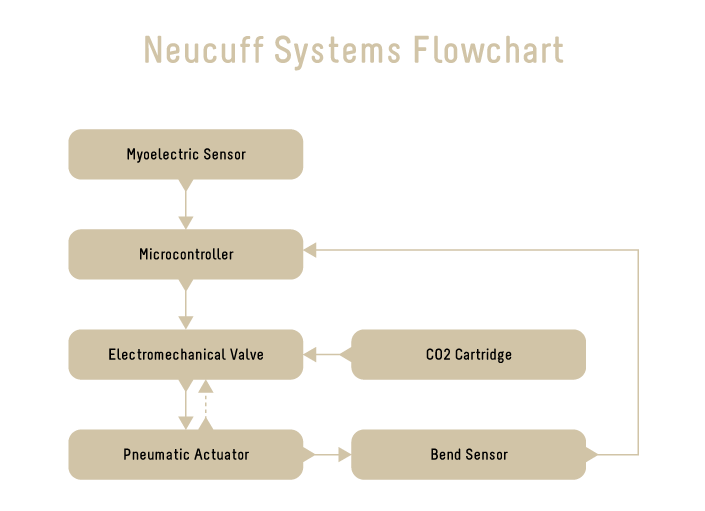
The basic concept behind actuating the Neucuff is that you can detect intentionality of arm movement in a person with Cerebral Palsy by performing signal processing on their bicep's motor neuron activity. There is some research out there in the medical literature describing methods for achieving this and myoelectric sensing seems like a plausible system for a first approximation.
I am using the Advancer Technologies Muscle Sensor V3 for the time being, but I'm still exploring other options as I talk with Cerebral Palsy experts to get a better understanding of how intentionality is measured and spastic motion can be mitigated.
The signal processing will be done with a microcontroller. Hopefully as the design gets refined the controller, the electromechanical valve driver, and the myoelectric sensor can be integrated into a discrete package to reduce the overall complexity. For now I'm using an external microcontroller running some basic programs provided by Advancer Technologies.
The electromechanical valve will be supplied with CO2 by a disposable cartridge similar to the ones you find in emergency bike tire inflators. They're cheap and energy dense. A CO2 cylinder has about 143 J/g [1] which is equivalent to a Ni-Cad battery [2]. I believe this offers some advantages over a battery. The first is instantaneous torque on the elbow, especially if coupled with an expansion chamber and wider ID tubing to reduce inline friction. It would require a large amperage power source to do the same with a small electric air pump. It also means recharging the device consists of switching out CO2 cartridges rather than plugging in the cuff. It's going to take more testing to validate using cartridges over a battery power source, but the early results are promising.
The final element to complete the control loop is a bend sensor for detecting how far the elbow has moved relative to the torque the actuators are applying. Since the entire cuff is wrapped around the arm, the material along the tricep and outer forearm will stretch substantially more than the material along the bicep and inner forearm. I believe that integrated stretch sensors along these two lines could easily be compared to compute the angle of the elbow. Whether stretch sensors are manufactured to tolerances that allow precise feedback and other issues will have to be explored with further testing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.