After weeks of trying, we still did'nt manage to balance the test base on the ball. The torque from the steppers are simply too little to drive the base reliably. To add salt to injury, because the omni wheels are mounted at an angle, driving the base without the ball while possible, introduces loads of vibration due to the spacing between the roller. This rendered us unable to test any of the navigation sensors.
With the deadline for the our Tech Factor challenge looming, something mus be done. So as a compromise, we decided to redesign the base such that wheels are not mounted at an angled. For this configuration the base needs to be enlarged and the stepper mounts redesigned. Here is our design:
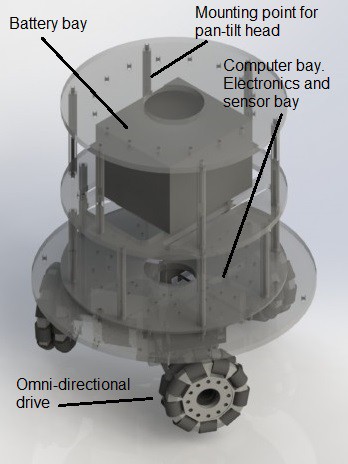
After extensive modification and upgrading, it looked like this:

After words about the upgrade. We have fitted two 12 V, 7 Ah sealed lead acid batteries. They are connected in parallel and power distributed by the driver interface board that we fabricated earlier. For the brain, we fitted a grossly under-powered QBOX-1000, a fan-less Box PC (the black box with two antennae sticking out) running Intel Atom Processor N270 with 2 Gb ram and a 64 Gb SSD (I believed). Above the brain we have mounted a Trendnet TV-IP651WI IP camera. This allows us to remotely drive the platform around and not 'kill' anyone. Lastly mounted above that is the RPLIDAR. The RPLIDAR came with a M2.5 threaded nylon spacers. For future compatibility to standard spacers, we re-tapped them to M3.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.