 The Big One
The Big OneAfter a bunch of design and prototyping, I have arrived at a new leg design. It has both the coxa and tibia (or femur, if I choose to expand the leg into three DOF) servos on the same segment. The joints support the weight of the robot; the servos are only there to provide movement and do not bear any load themselves.
The design is below (side view and top view respectively),
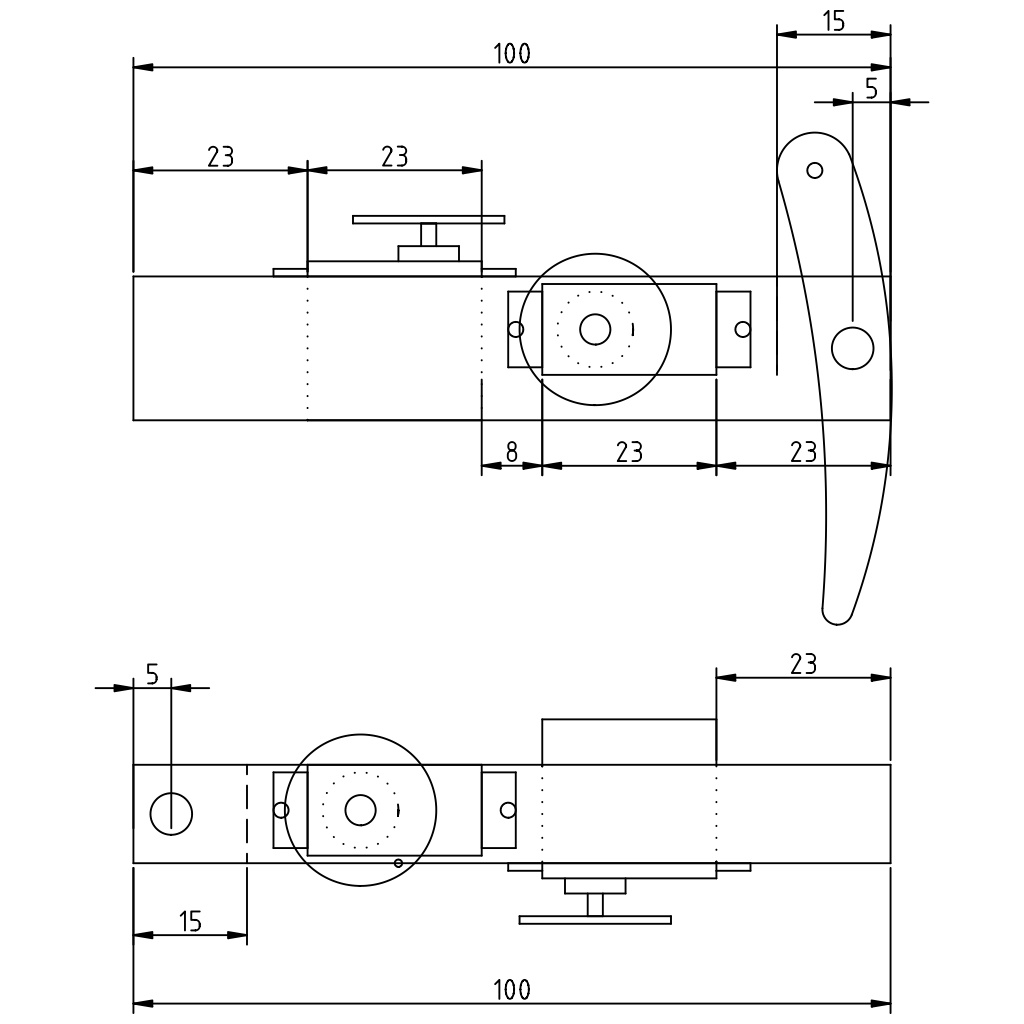
I am now in the process of manufacturing 6 legs. The main section is made from aluminum; the tibia will be 1/4" MDF, and the 15mm section which the axle holes are drilled though are wood (to provide additional support).
Pictures and videos forthcoming when I am finished...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.