 The Big One
The Big OneI've been busy with yard work the past week or so, but yesterday found time to finish the last of the legs and the thorax, and get them assembled. All legs are moving very smoothly, and the entire thing looks great IMHO. (It is reminiscent of those wood-cut dinosaur skeletons, I think...)
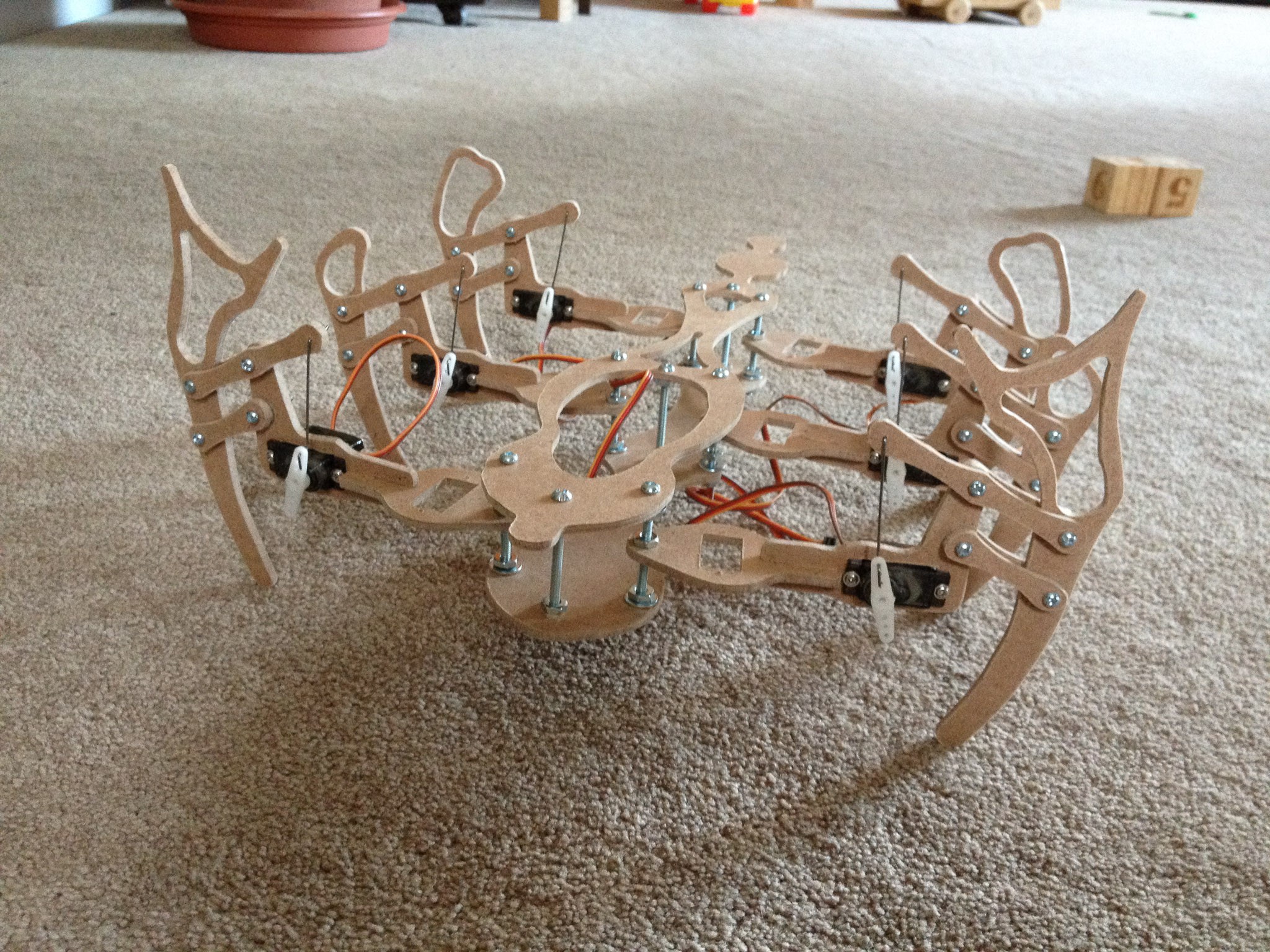
Here is a closeup of the coxa joint assembly. Each joint uses one 2" #6 machine screw, two washers, 4 hex nuts and one lock nut. The legs are securely fastened between two nuts, the lock nut is at the bottom, and the washers + nuts are positioned (loosely) at the top and bottom:

This allows the screw / axel to rotate freely in the top and bottom board. The distance between the top and bottom boards keep it from binding, and the three spacers (seen in the above picture as the single screw with tightened nuts on the top and bottom) keep the two boards separated and stable.
Next steps are to add all the coxa servos, make the coxa control rods + drill control rod mounting holes, and then program the chip to account for the new servo positions. (Hopefully the printed boards will arrive before doing the last bit...). Eventually I plan on adding a moveable (1 DOF) head with ultrasonic distance sensor + (1 DOF) jaws, a moveable (1 DOF) abdomen, etc. Eventually I plan for Stubby to be semi-autonomous (most likely able to be controlled via the remote, but able to detect obstacles and able to go into autonomous mode with a button push or something.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.