 The Big One
The Big OneSo I decided I was not a fan of the 2DOF skeleton bug after all. Since I have more or less solved the manufacturing problem (scroll saw FTW!), I have decided to move onto more interesting software. To do that, I need to add another DOF to the legs so that I can write a full IK engine.
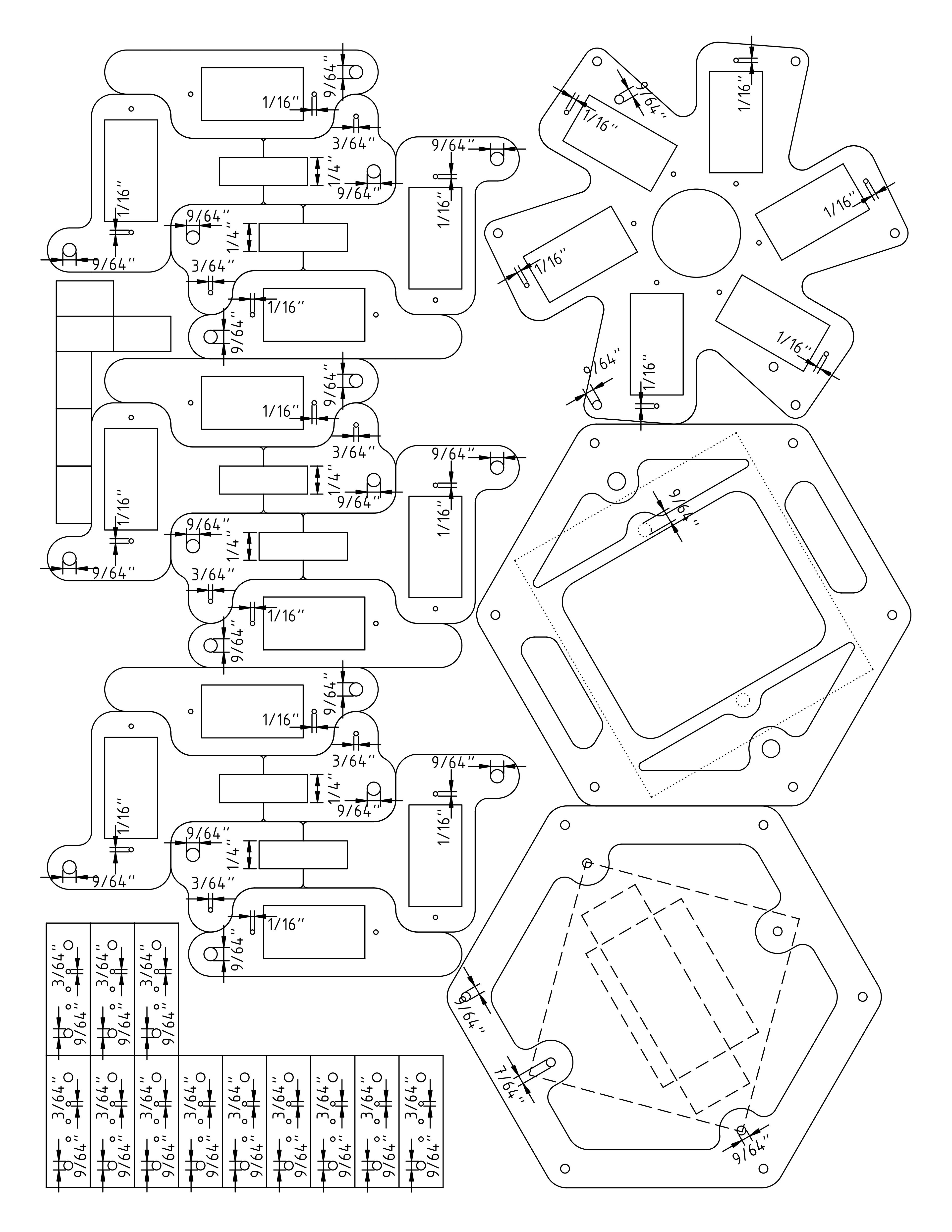
This build is the most intricate of any I have attempted so far, and is also the smallest (even smaller dimensionally than the short lived first iteration). As with the other builds, the frame is made entirely of MDF, with machine screws for axels and for attaching the parts together. The plans for the frame fit on a single sheet of 8.5x11" letter paper. These can then be printed out, glued to the sheet of 1/4" MDF, and cut on a scroll saw. The kerf (blade width) of the scroll saw is almost identical to the printed line width, which means that I can butt the edges of each component up against other components, and that when I cut it Just Works - the pieces come apart like a puzzle.
The plans, meant to be printed on a single 8.5x11" sheet, are below:
Yesterday evening I finished the last of the cuts, and assembled the entire robot (only thing lacking still are the push rods, which I plan to cut today). Below is the assembled robot, ready to have the servo horns + push rods attached (poor quality iPhone photo, sorry!):
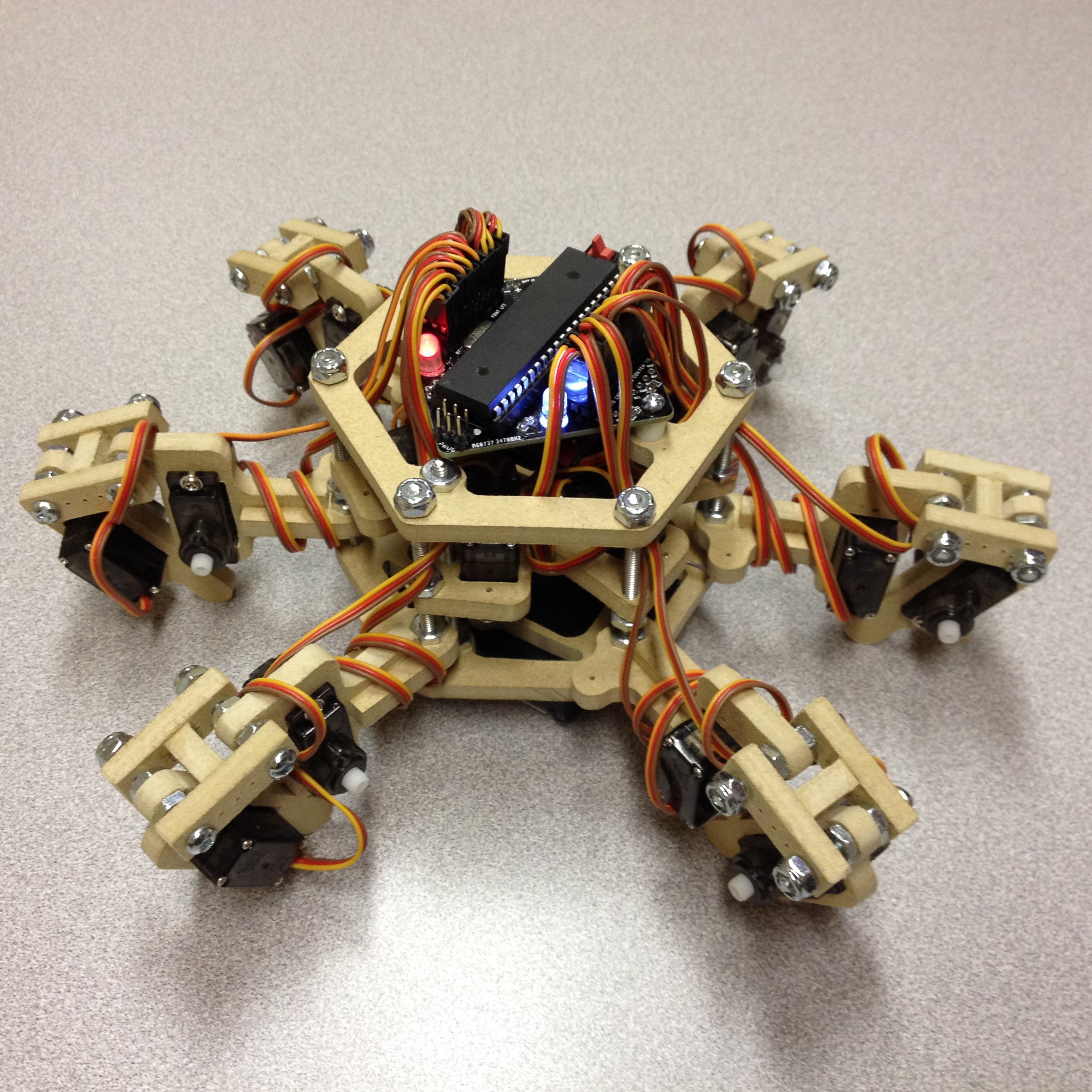
By the end of tonight I plan on having the servos + control rods connected, and ready to start the software (which in this case will by far be the hardest part).
The software will include an inverse kinematics engine, and should allow for movement in arbitrary directions, plus (limited) yaw, pitch, and roll. Since I am still using micro servos, I had to keep the legs short, so total speed will be relatively low, and the total range of motion will not be huge. It will hopefully be sufficient, though.
The cost of this version is pretty much the same as version 2 (and in fact is probably a bit less, since it uses less MDF, smaller screws, and completely forgoes the extruded aluminum brackets). The majority of the cost is in the servos (of which 18 are now required, rather than 12 previously) and the electronics (an XBee is very expensive for what it does, but I already had it so I used it). For cost savings, a different radio would be perfectly fine.
Once I get a decent start on the software, I will update the build logs to reflect what is happening in this version.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Are you sure? yes | no