 Nathan Peterson
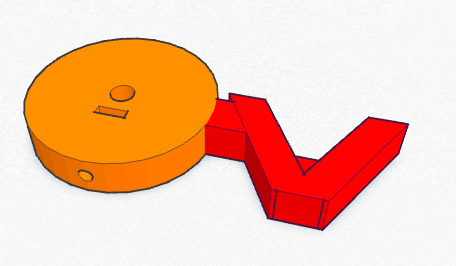
Nathan PetersonHere is my first arm design created on tinkercad. The slot is for a square nut to hold a screw that held the arm onto the stepper motor shaft.
I built a wooden frame to use a a ramp to roll the balls on, and mounted the motor, motor driver, and arduino on the back. Notice that the stepper motor has a white disc on the back shaft. This is a makeshift encoder to sense the initial position of the motor on boot up. It has a slotted optical interrupter to sense a notch in the disc.

I printed this arm at techshop on a makerbot:
I was able to get it to juggle one ball a little bit. Here is the video:
I was able to get it to do some minimal juggling with one ball. The main problem with this design is that it doesn't allow for any way to catch a ball in a different spot that you are throwing it from. That will be important later when I want to add more balls without causing collisions. Another problem (other than that the hand is very small for catching) is that there is not much room to maneuver. If I rotate the arm too much, the ball will fall out of the hand. Stepper motors don't have a lot of torque, so it is better if it can accelerate some, which means that it needs to be able to rotate more. Also, lowering the incline of the ramp helps, but also causes problems. Having too low of an incline makes it take a long time for the ball to settle before you can throw it. Obviously for one ball that is not a big concern, but whenever you have more balls than hands, there is a time constraint as well if you want to aviod collisions.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.