 Laetitia BEL
Laetitia BELThe IMU SENS modules embed 6x IMU chips and 2x baro/temp/hum sensors.
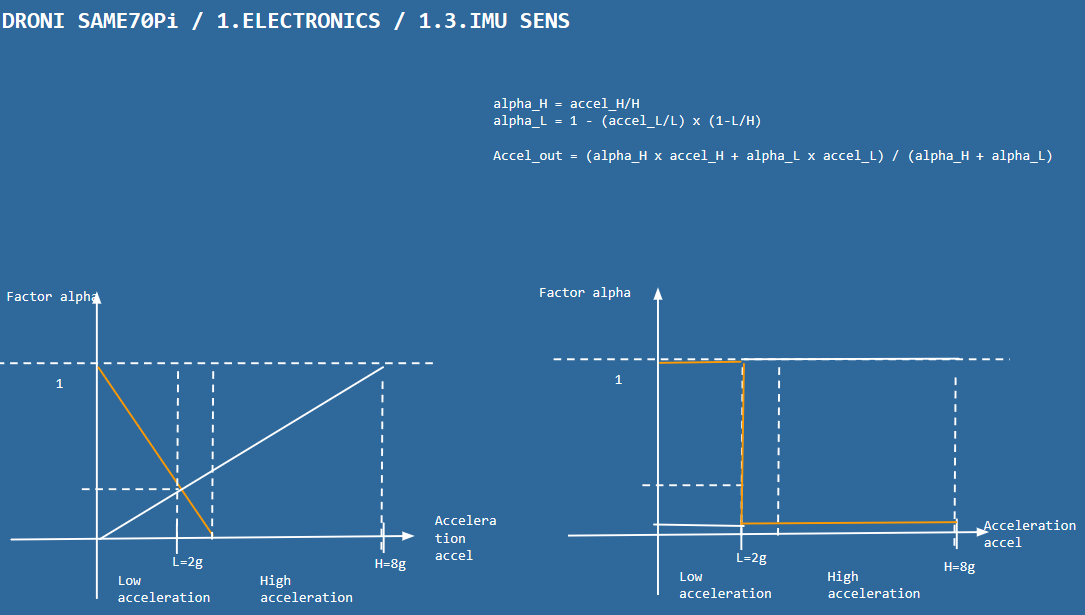
The idea behind having multiple IMU sensors is to allow the user the get a better accuracy event in high/low accelerations.
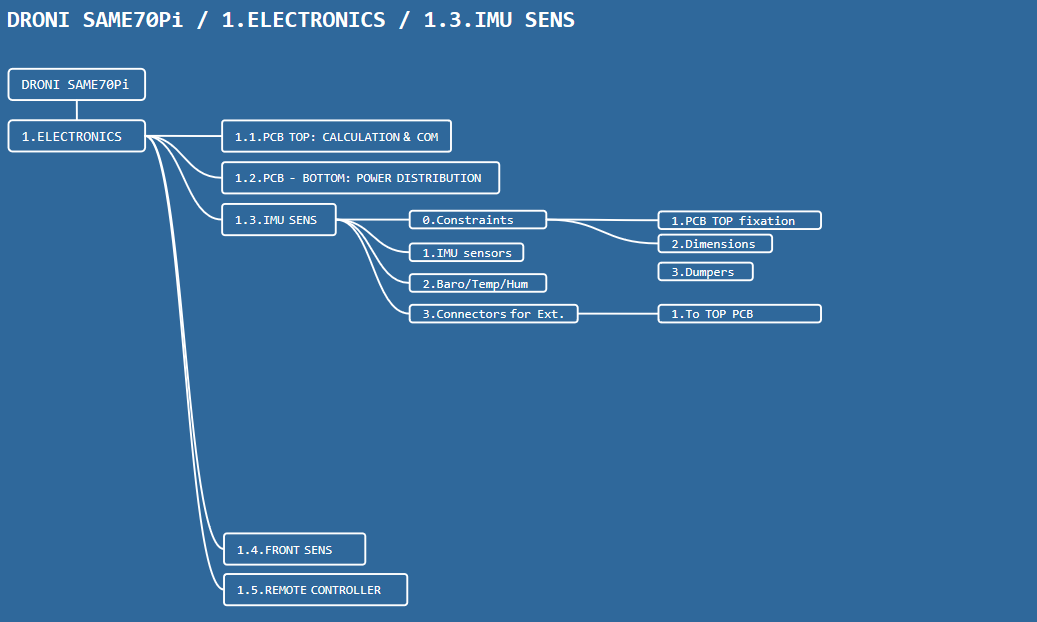
1.3.0.Constraints
The dimensions of the IMU SENS and the dimensions shall be compliant with the PCB TOP.
The fixation to the PCB TOP shall be possible through dumpers.
 http://www.hobbyking.com/hobbyking/store/__40612__Vibration_Damping_Ball_50gram_8_pcs_bag_.html
http://www.hobbyking.com/hobbyking/store/__40612__Vibration_Damping_Ball_50gram_8_pcs_bag_.htmlThe sensors shall be both I2C and SPI.
1.3.1.IMU sensors
The IMU SENS shall use the following sensors for initial sensing:
- 2x BMI160 for 2g sensitivity
- 2x LSM6DS3 for 8g sensitivity
- 2x LSM9DS1 for 16g sensitivity
The IMU sensors shall be redundant.
The acceleration fusion is selected according the the sensitivity and the current measured acceleration.
1.3.2.Baro/Temp/Hum sensors
The IMU SENS shall use the 2xBME280 sensor for temperature, pressure and humidity sensing.
1.3.3.Connector with external interfaces
The IMU SENS shall have an interface with the
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.