 Laetitia BEL
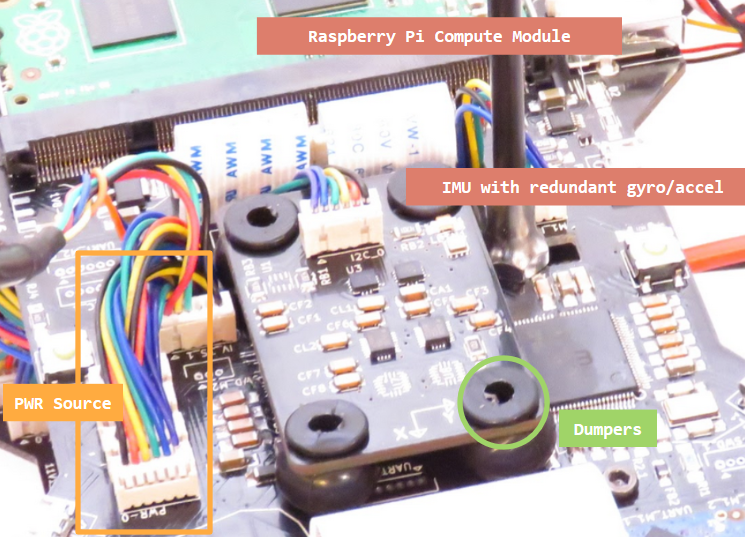
Laetitia BELHere is how it looks like the IMU sens placed on the PCB TOP.
It has multiple redundant accelerometers and gyroscopes.
It is placed on dumpers for vibrations absorptions.
A project log for Open Source All-In Drone-Droni SAME70Pi (Kopernik)
Yet another open source platform for drones, but this one is fully integrated and uses the SAME70@300Mhz x2 + a Pi Compute Module
Here is how it looks like the IMU sens placed on the PCB TOP.
It has multiple redundant accelerometers and gyroscopes.
It is placed on dumpers for vibrations absorptions.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thank you P43YM, I agree. I will rethink that by adding a microcontroller that makes the fusion. For the moment I used more light dampers, it works fine with the vibration of the motor.
The project is quite complex, bad that none from the Hackaday authors didn't review it for the Hackaday prize... :"(
Are you sure? yes | no
Oh, it's sad. Do you continue this project? I wish you good luck, I will follow the progress.
Are you sure? yes | no
Dude, the whole project ... the overall complexity is simply amazing. As for the IMU module, I think the dampers are too tough for this small board. I think you need to add a weight to the board or use a soft foam in a closed case, like in a pixhawk cube. here's photo https://yadi.sk/i/HkOszX4iQkwhUQ
Are you sure? yes | no