 Alvaro Villoslada
Alvaro Villoslada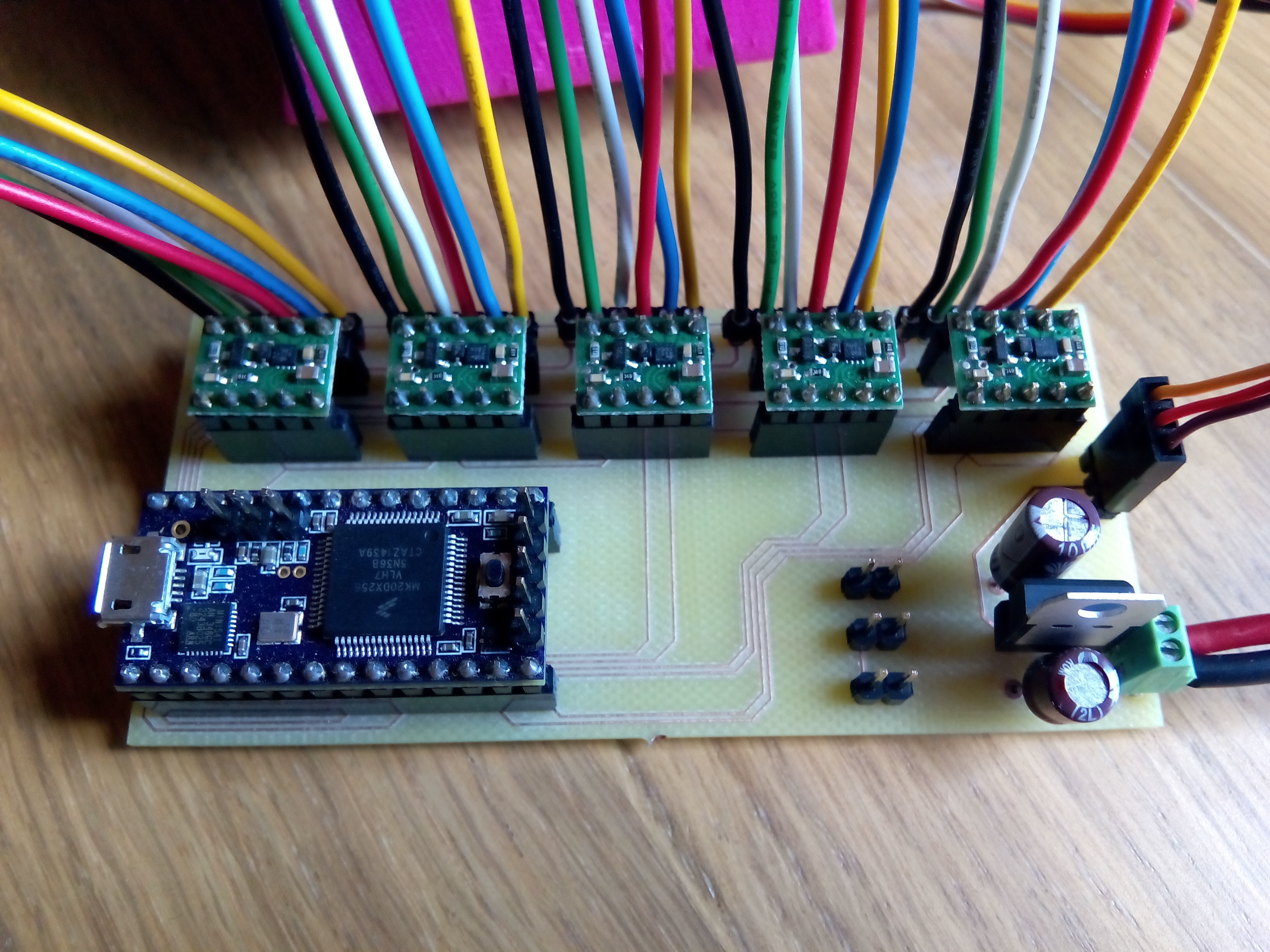
This is the first prototype of the Dextra control board, which I've been testing today and works like a charm. Until now I have been working with all the components placed on a breadboard. The mess of wires was horrible, so I designed this very simple PCB containing a Teensy 3.1, the five DRV8838 motor drivers and a voltage regulator to lower the battery voltage to that required by the abduction servomotor. The Teensy board and the driver boards are inserted into a series of sockets to be able to replace the components in case something burns.
The next step in the electronic part of the project is to start working with the current sensors to implement a force controller for the hand. Also, thinking on an easy way of controlling the hand when used as a prosthesis, I'm planning to use an accelerometer to switch between different grip patterns by moving the hand in different directions. In this way, the user would change the grip pattern by just moving the hand in one direction, and the grip would be activated by just contracting one muscle, using only one EMG sensor. I will detail this idea in depth in one of the next project logs.
Once I have all this working, my plan is to integrate all these components in a control board that will be integrated inside the hand, with just three external connections: USB to program the hand, a connection for the EMG sensor (serial, SPI or I2C, I still have to decide) and the power connection (for a battery or a wall adapter power supply).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.