 Alberto
AlbertoHello!
I'm working on an infrared system to add the auto-location capacity to the robots. The first test prototype shows that modules can detect each other from about 3 meters apart, and they can detect aproximately where is the other module located. For this "long range" detection, a modulated IR signal is used.
When they are close (30cm), a non modulated detection is used. The receiver looks where is the max intensity of infrared light is and goes there.
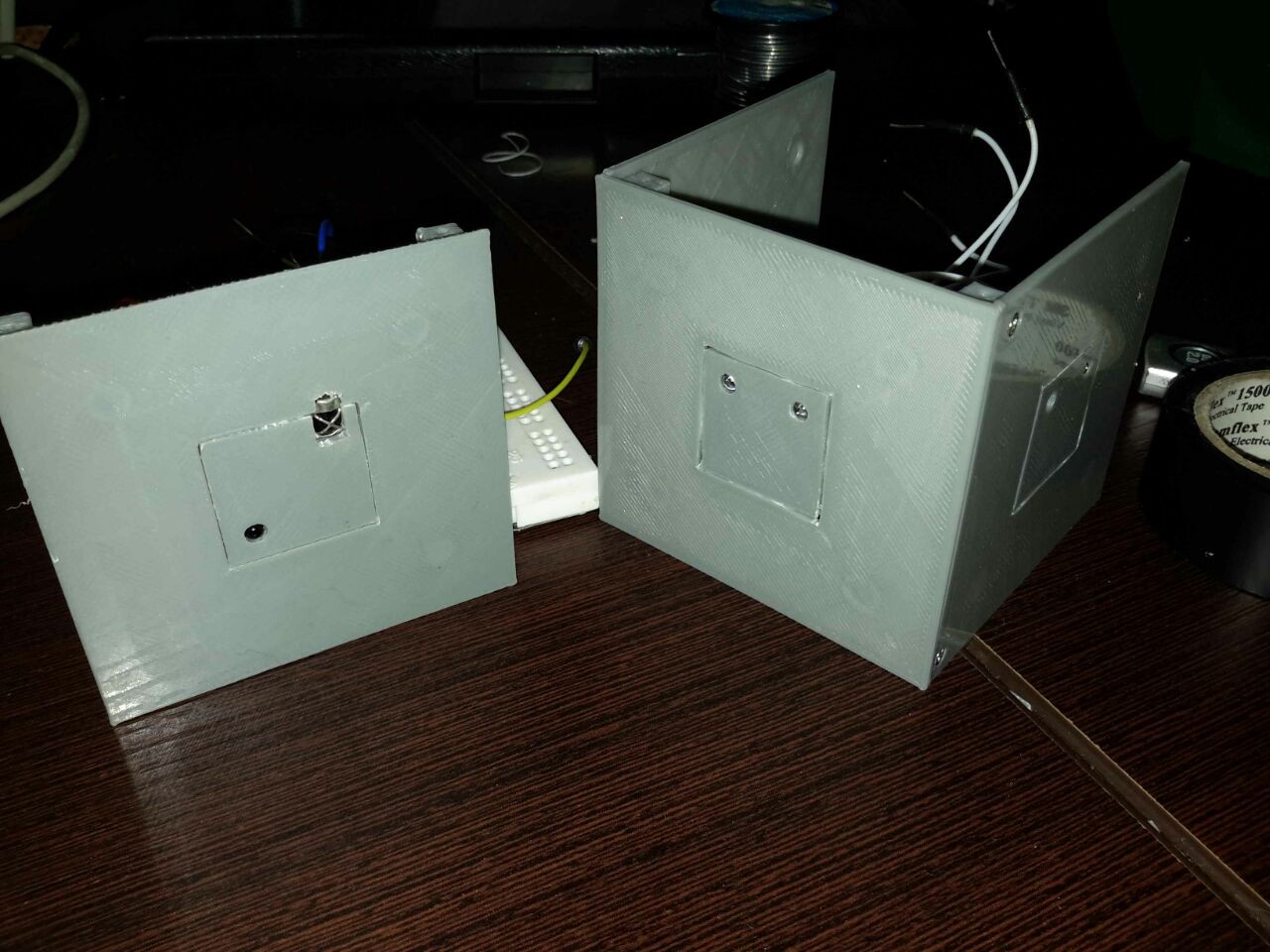
This is the test unit.
Hopefully by the end of this month we will have the results!
Thanks
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.