 Adrian
AdrianMy first Hackaday.io project write-up is a Tea making machine that me and my Son Oliver started last summer during his break from Uni. It's been gradually updated and upgraded to the point where it's become an indispensable kitchen appliance. The motive for the build was simple... we were both pouring boiling water onto teabags in a cup and then wandering off and forgetting them - only to remember 10 minutes too late.
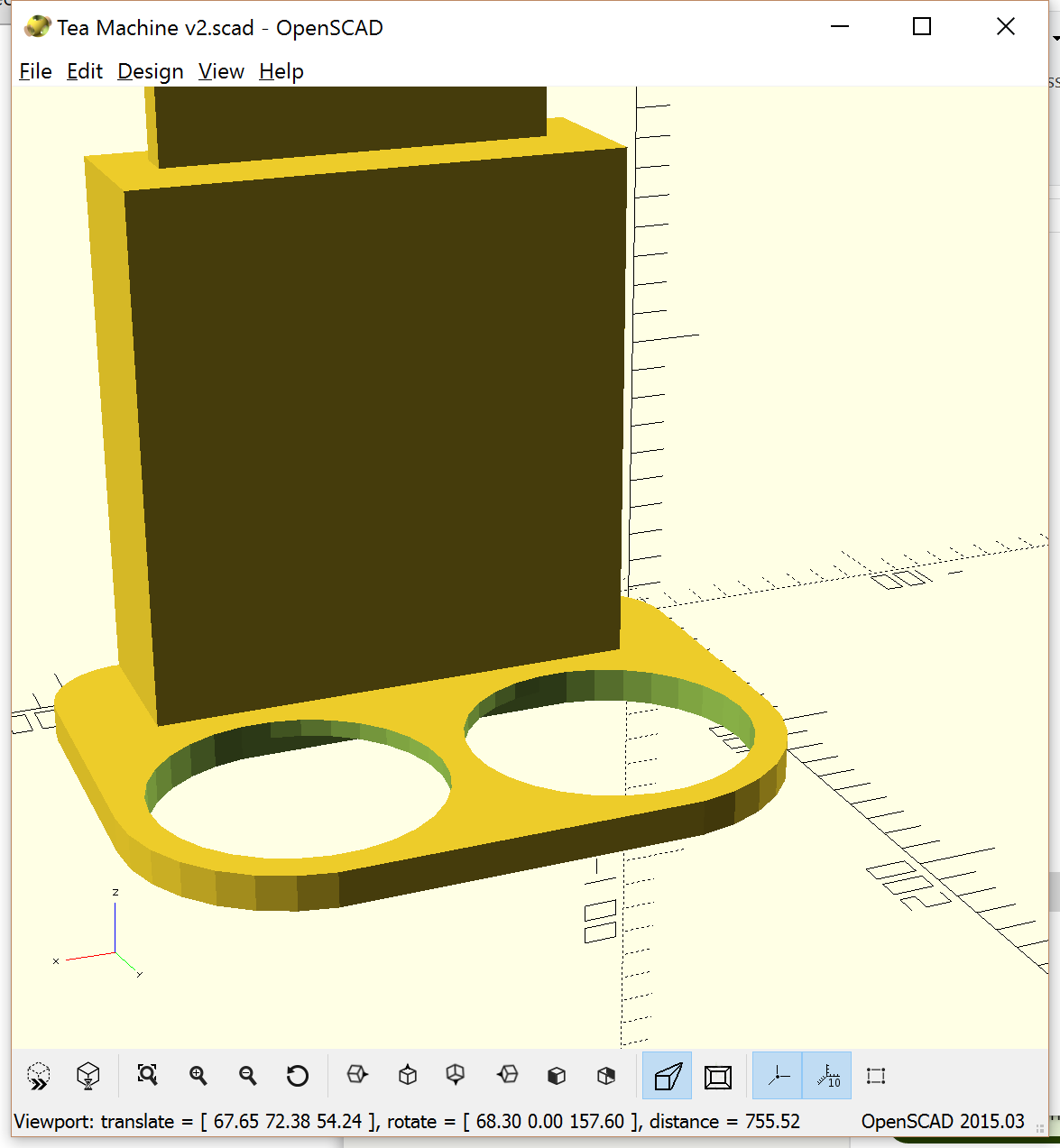
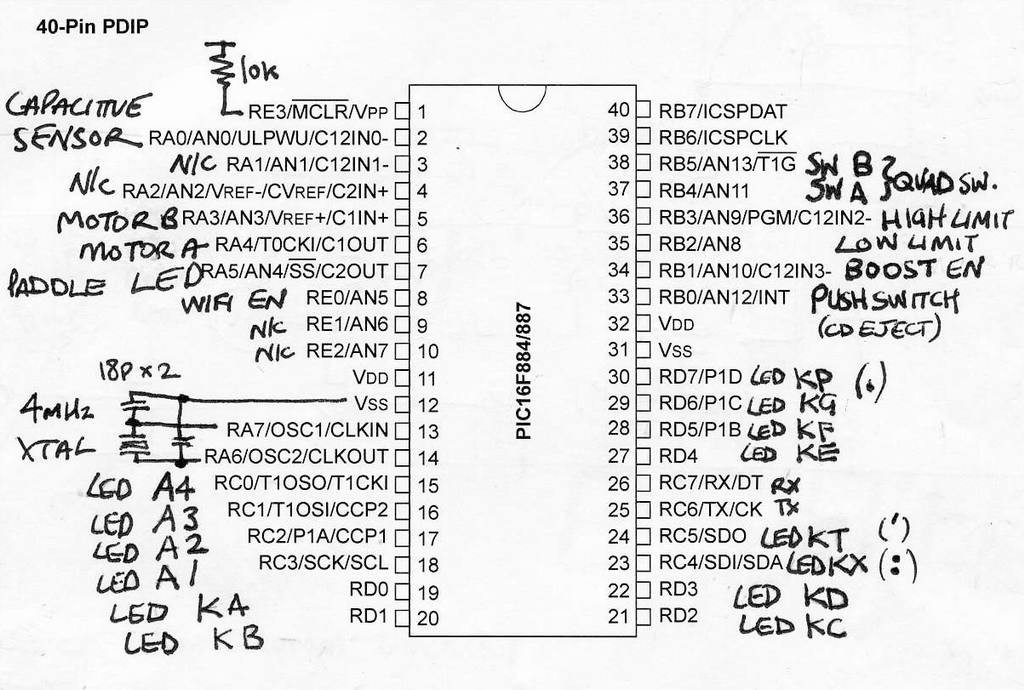
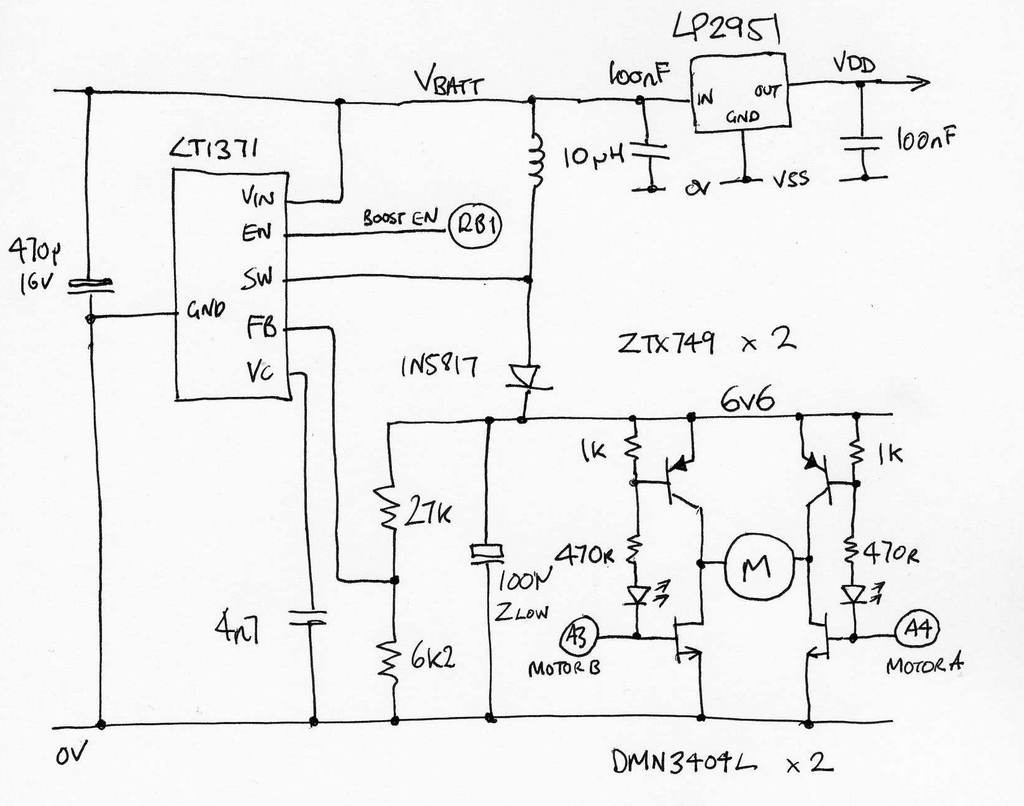
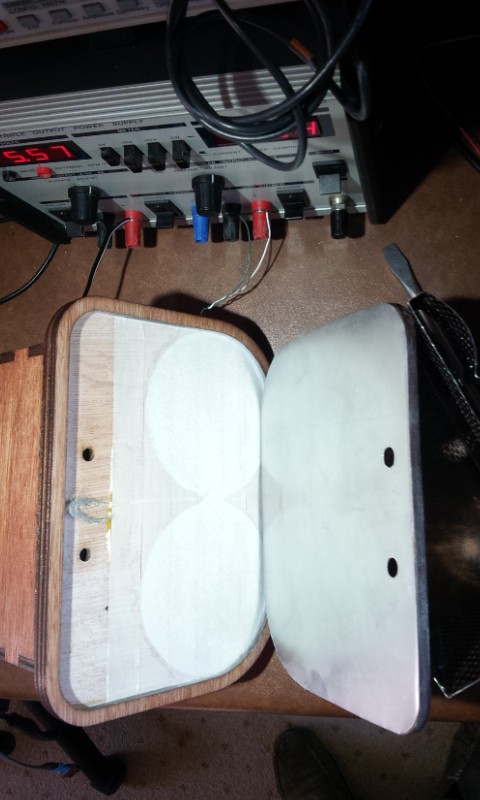
The ideal solution was therefore a device that would dunk one or two bags for a preset time and them raise them from the cup automatically. To get the bags moving, we settled on an old CD drive stood on end. To the CD tray we fitted a stainless steel mesh cut and folded into two holders for the teabags. All the control is handled by a PIC 16F887 which is woken by a push on the paddle that presses down on the eject button. A transistor H-brige runs the original motor and everything is powered by 4xAA batteries.
Finer points are a rotary encoder for setting the steeping time and a capacitive "load sensor" that detects when the water is poured to start the timer. The same sensing is used to determine that the cups have been removed at the end of the process.
We think the automation is about as complete as it could be now. To make tea, one press on the paddle turns on the device and the gantry rises - tea bags are inserted, cups placed and a final press lowers the gantry + bag(s) into the cup(s). Pouring in water from the kettle starts the timer so once poured we just walk away.
At the end of the timing period the gantry is lifted and, as of this year, a notification is sent over WiFi to PushBullet using an ESP8266. After the cups are removed the gantry is lowered and the device goes into low-power standby.
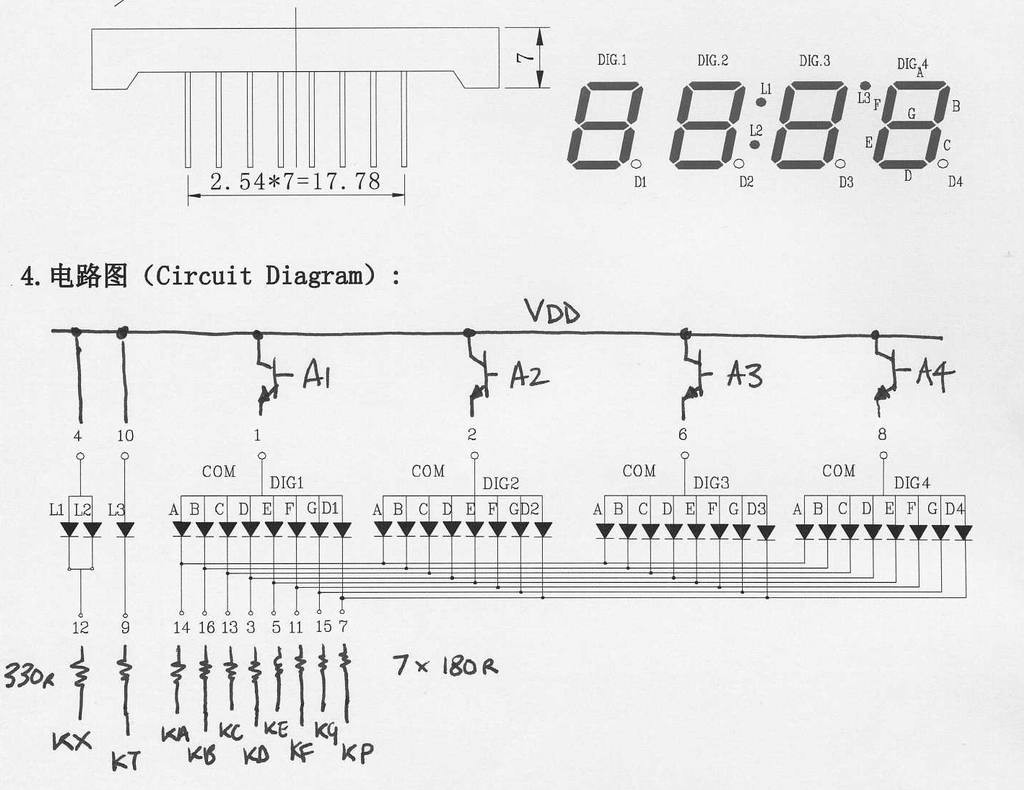
The construction is mostly laser-cut 6mm ply with a smoked acrylic window for the display and mirror acrylic for the edge-lit paddle on top. This part has an engraved finger that hints at what you should do to operate the Tea machine




 Mirko
Mirko
 ydrip
ydrip
 Manas Ramidi
Manas Ramidi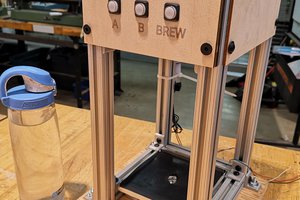
 Sean Morton
Sean Morton
You're welcome! Coverage was well-deserved :)