Oskar Weigl
Oskar Weigl-
ODrive Robotics, Inc
07/09/2017 at 02:20 • 2 commentsODrive Robotics, Inc has now been incorporated in the state of Delaware.
![]()
This may sound very fancy, but it's actually still just me working on this. But hopefully that will change soon!
Fundraising and Recruiting
With the company entity formed, I can now start equity fundraising and give shares in the company in exchange for investment money. Hopefully I can raise enough money to hire another full-time developer. Alternatively I might find someone who is interested in joining as a late-stage co-founder.
In either case, I hope to grow the headcount to 2 imminently, which should help to speed up development significantly.
Interest in ODrive v3.3
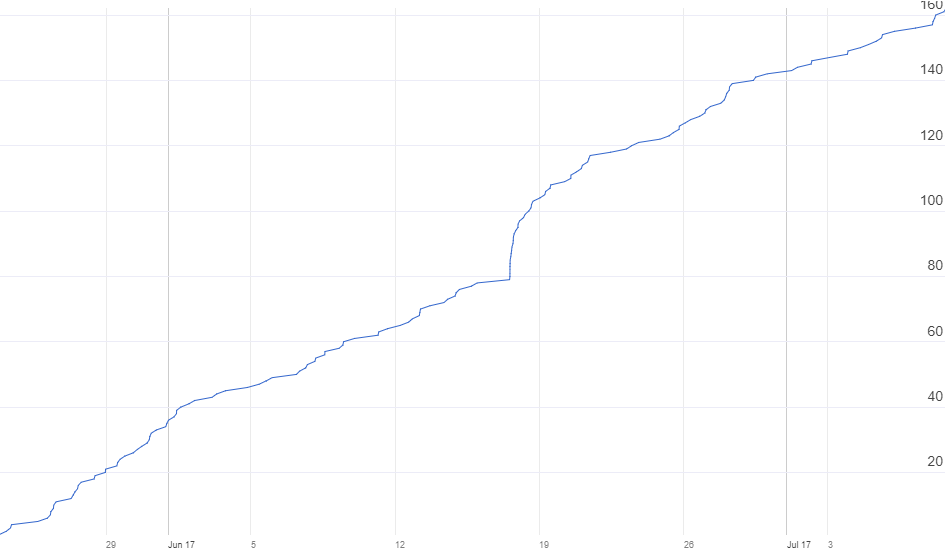
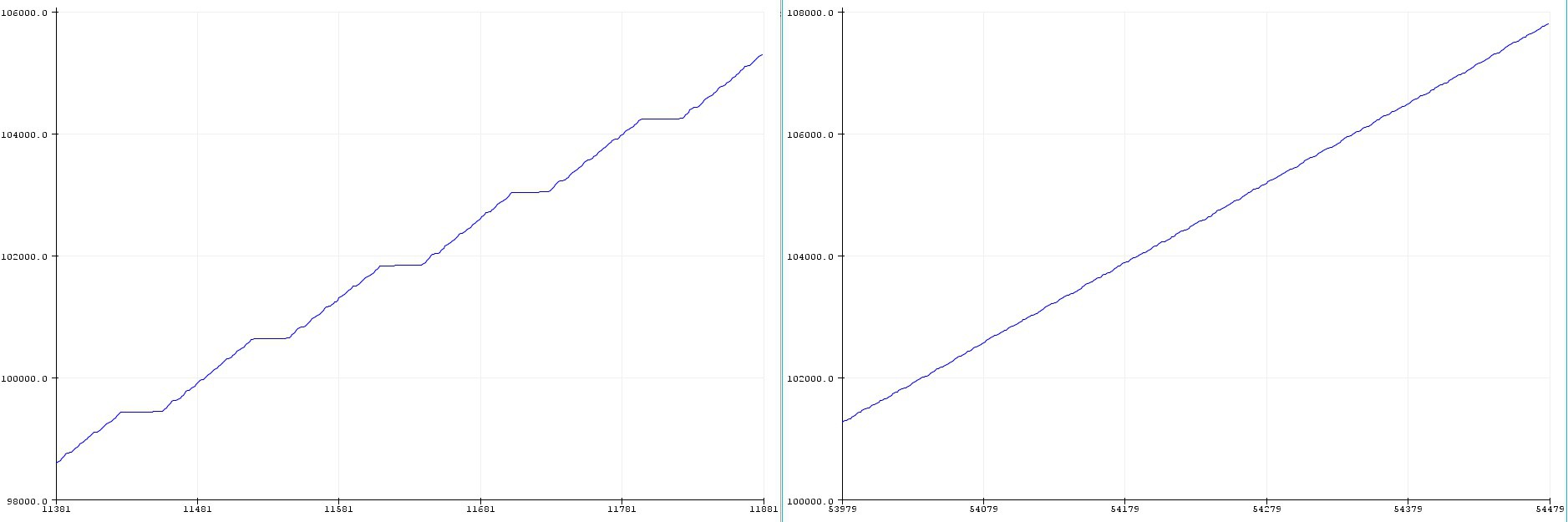
Since the sign-up for getting notified when ODrive v3.3 is available opened about 6 weeks ago, there has been an average of almost 4 signups per day. This means that the coming batch of 100 ODrive v3.3's is already oversubscribed. So just a head's up, they may sell out fairly quick once released.
I'll make sure to send out the notification of when exactly they will be released a couple of days in advance of the release.
![]()
ODrive v3.3 signups over time.
-
Step / Direction Interface
07/18/2017 at 02:40 • 0 commentsThe first version of the much requested interface for ODrive, step/direction signals, is now ready. If you want to try it out, check these instructions.
Demo:
Step/direction is the most common interface used by existing motion controllers to talk to stepper motor drivers. With the support of step/direction, you can use existing motion controllers and let ODrive be a drop-in replacement for the stepper drivers. In the above demo, a TinyG is used, but the signals are the same as used by the Smoothieboard, Rambo, Mach3, RAMPS, well basically all of them.
-
Sensorless Mode
08/04/2017 at 23:50 • 0 commentsQuite a few of you have requested sensor-less operation: running the motor without an encoder. This is now a reality:
Video shows open-loop startup speed-ramp followed by switching to closed loop FOC velocity control.
The main limitation of this mode is that it's not able to provide precise control at very low speeds (it can however spin up to speed using not-so-precise control). Therefore, this mode is great for applications where the primary operational regime is at speed. So not great for CNC machines or polargraphs, but great for electric skateboards and conveyor belts.
If you are interested in the technical details, or have an ODrive and want to try this out, please see the Sensorless mode post on the forum for more detail.
-
Electrical issue discovered
08/13/2017 at 07:57 • 0 commentsThanks to the help from the community, recently we uncovered a hardware bug that affects all ODrives manufactured to date (v3.3 and earlier).
This bug is described in more detail here, and the fix is described in detail here.
In short, the bug means that the GND on the GPIO pins and the M1 motor gate driver has significant spikes of electrical noise. This causes glitches on the control signals on the GPIO pins, and motor control glitches on M1.
If you plan on using M1, it is strongly advised that you apply this fix. You can follow the instructions as linked above. If you do not feel comfortable applying the fix, you can also send the board to me (San Jose, CA, USA), and I will apply the fix for you, free of charge (you pay shipping to me, I pay shipping back to you). If you need help to apply the fix to your board, please email info@odriverobotics.com, and we can arrange it.
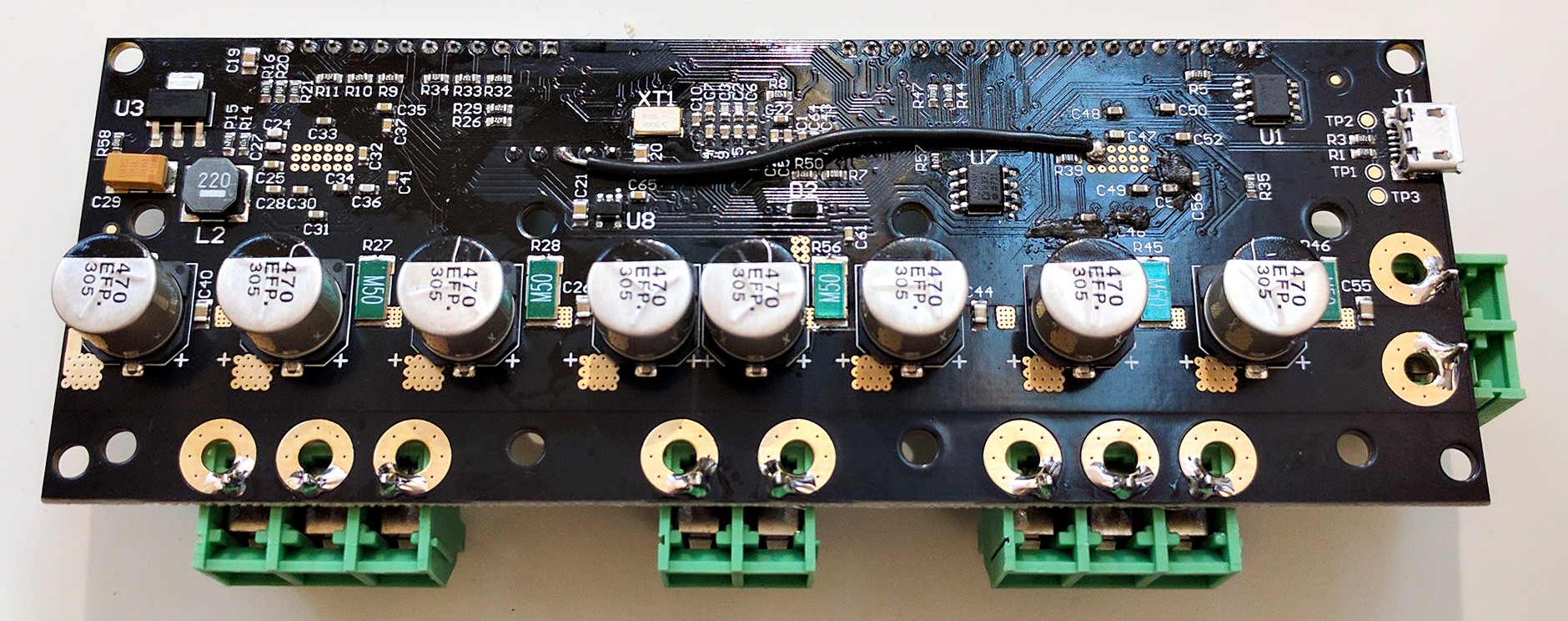
We have already started applying the fix to all the ODrive v3.3's:
![]()
The fix applied to an ODrive v3.3.
![]()
Applying the fix to all the ODrive v3.3.
-
Which voltage in your application?
08/25/2017 at 03:40 • 0 commentsIt’s good to know what voltage range people want to use ODrive for in their application. Right now the voltage rating is for 24V, but it’s fairly easy to change. There is a current handling penalty to increase it though, so it might be useful to offer two versions. To help us decide between the different options, please answer the poll about what supply voltage would be the most ideal in your application. You may check multiple options if they apply to you.
Thanks!
-
Three Demos
10/02/2017 at 04:09 • 0 commentsIt's so awesome to see what kind of cool stuff people are doing with the ODrive. Here are 3 demos of fairly different nature. I think they are awesome, I hope you do too!
Willam Osman put ODrive on a PowerWheels. This video is actually a few months old now, and I probably should have posted it earlier. Anyway, watch that thing do doughnuts:The Arduino library and UART communication is under way, a usable release should be ready in a couple of weeks. Check out the first demo:
Bauerslab posted his awesome Skittle Sorter on the ODrive forum. It's really awesome to see the diverter teleporting around. If you wanna skip to the action, it starts at 6:15.
-
UART and Arduino Library
10/18/2017 at 01:43 • 1 commentThe UART feature is now ready for testing.
Many of you have been waiting for the ability to control the ODrive from another microcontroller, and so this feature complements the USB and let's you do exactly that.
I have also made a first revision of an Arduino library that lets those of you who wish to use Arduino get started quickly. If you don't use Arduino, you can still have a look at the library to see how the communication is implemented, and copy that to your platform.
The UART feature is currently in a pull request, which means that the documentation on the master branch hasn't updated yet. Please check the documentation on the uart branch instead. Here are some of the important things that are new for UART:
If you have any problems, or if everything worked perfectly, or anything in-between: please help us with feedback. Once this feature has been confirmed to work for enough people, we will merge it to the devel and hence master branch in the next release.
-
Cogging Torque Compensation
11/06/2017 at 22:55 • 0 commentsInexpensive hobby brushless motors are powerful, but they are not built for precision applications. One of the undesirable characteristics of less expensive motors is cogging torque. This is the torque generated by the permanent magnets in the rotor being attracted to the iron in the stator in an unbalanced way.
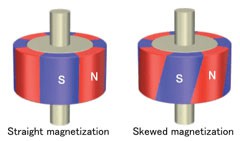
In more expensive motors this is avoided by skewing the rotor magnets, as shown below. This balances the reluctance torque across the skew angle, which eliminates most cogging torque.
![]()
Straight and skewed rotor magnets.
Interestingly, the cogging torque exhibited by the motor is a constant function of the rotor angle. That means that if we can figure out what it is, we can improve the performance by simply compensating for it.
And that is exactly what we did. Thanks to the implementation of a calibration and compensation algorithm by @Wetmelon on the ODrive forums, we can estimate and cancel the cogging torque.
![]()
Cogging torque map: Current as a function of encoder count. Measured values in blue, fitted values in orange.
![]()
Without and with anticogging, showing rotor position at 25 RPM commanded velocity. Note that the feedback gains were not very stiff for this test.
Note that the above is just an excerpt of the full writeup, please see that for more detail, and full resolution plots.
This algorithm is already merged to the devel branch of the ODrive firmware, and after sufficient testing will be available in the next release. -
Announcing 48V ODrive Board
11/06/2017 at 23:05 • 2 commentsMany of you have requested that there should be available a 48V version of ODrive. I'm happy to announce that this is expected to become available in the beginning of 2018. To be notified when it will be possible to order, please sign up here: https://goo.gl/forms/EUJP726GsLaBf5YN2.
Some things to note:
- The price is expected to be $149.
- The current handling capacity will not decrease, hence the power handling capacity will in principle be double that of the 24V version.
- We will keep offering the 24V version at the same price as before: $119
-
ODrive v3.4 Ready Soon
11/24/2017 at 01:09 • 0 commentsWe have managed to sell out of ODrive v3.3, thank you everyone who has shown such support! The batch of ODrive v3.4 are due to arrive in about a week from now, and we hope to have them tested and available to ship in the beginning of December.
As you might be aware, we used to have a restriction asking you to not order more than two drives at a time. Now we are able to order much bigger batches, so this restriction is lifted: order as many ODrives as you would like. With this batch and going forward, I think we should be able to keep ODrive from going out of stock.
On that note: If you are an OEM or Distributor, please get in touch, as we now have the capacity to take large orders.
Thanks to everyone who has helped to make this possible,
Cheers,
Oskar.
ODrive - High performance motor control
Hobby brushless motors are incredibly cheap and powerful. However we need a way to make robots out of them. ODrive is that way.