 matthew
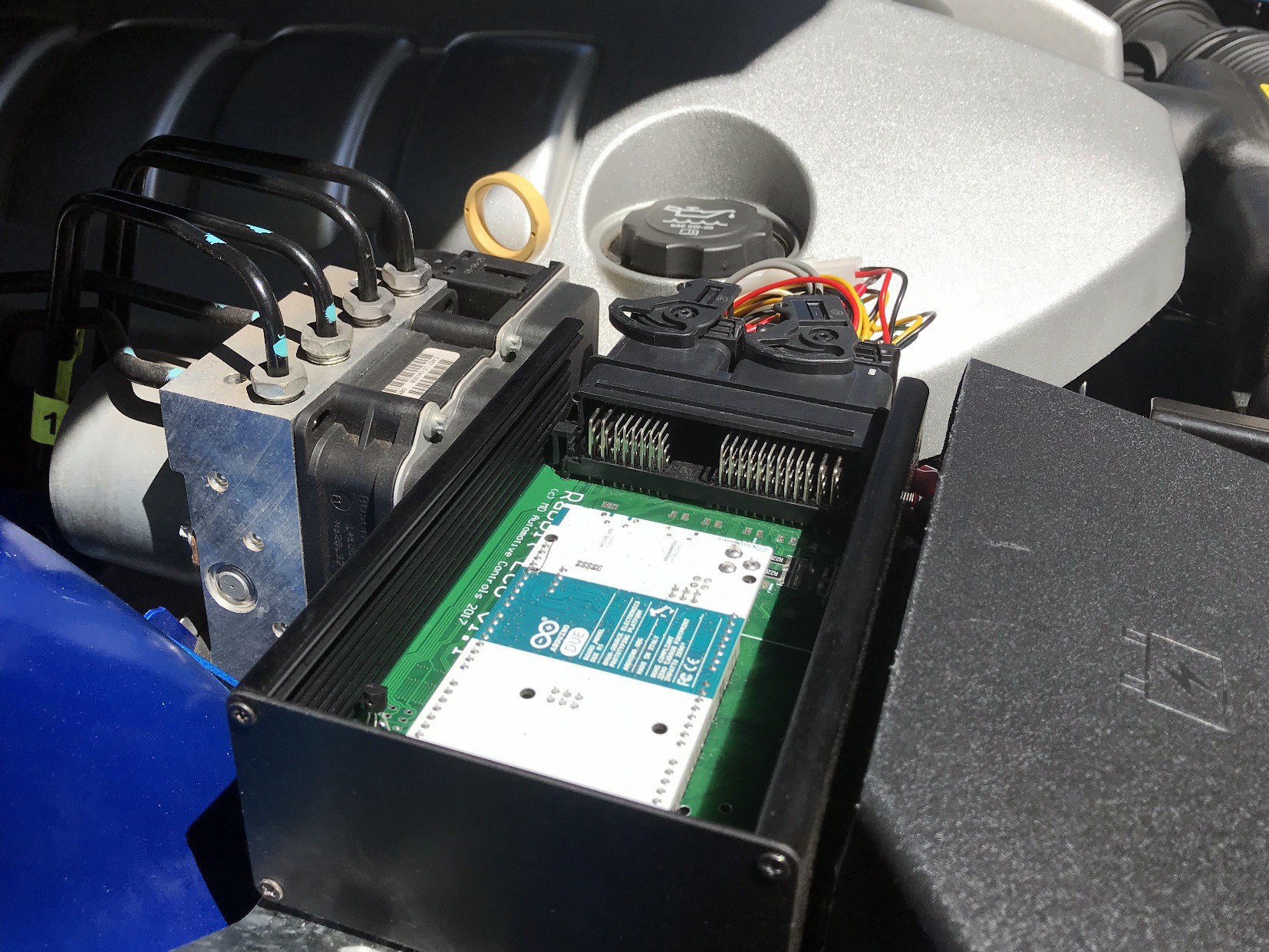
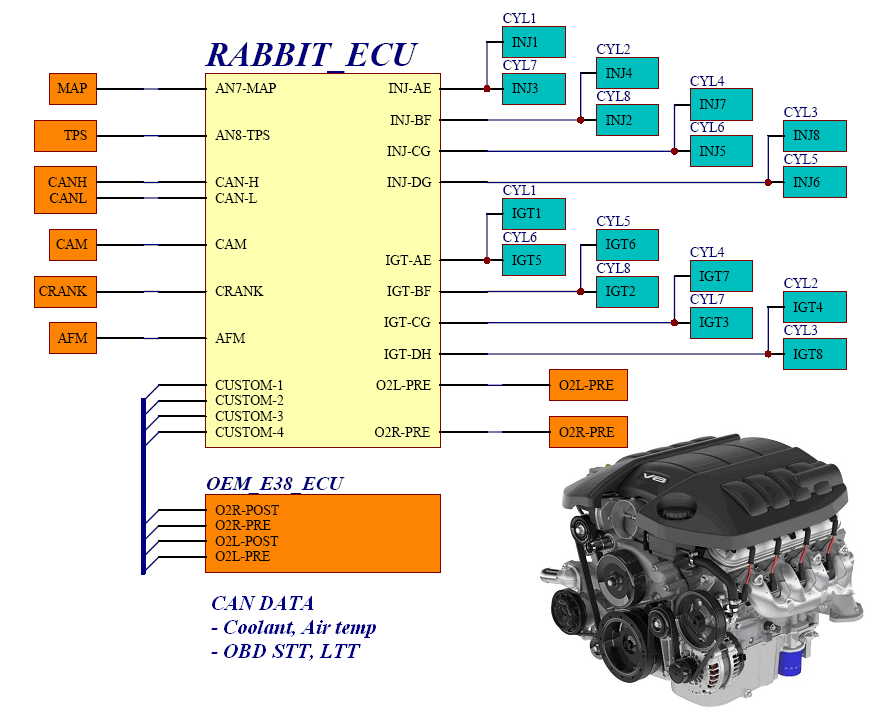
matthewIn this project I want to create a cool creative interactive ECU shield that works with the latest ARM based project boards (for this project Arduino Due). The hardware features of the ECU shield are:
- 1 peak hold driver for the batch firing low impedance injectors
- 4 saturated injector drivers
- 4 igniter signal channels
- 10 general purpose medium current drivers
- 4 push pull motor drivers
- 1 LSU4.2 interface
- 1 CAN interface
- 8 analog inputs
- 2 multi trigger inputs
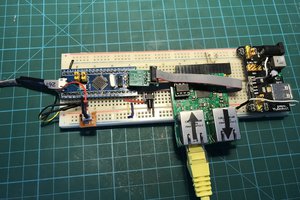
The hardware is mostly complete and I am testing it now. So most of the project work will be developing software for the SAM3X8E micro in the Arduino Due. There is quite a bit of development and porting to do so if anyone is interested and has some ATMEL insights then please get on board! It would be also great if anyone is game for a multi injector multi coil application.





 Blake W. Ford
Blake W. Ford
 Frédéric Druppel
Frédéric Druppel
 Rory
Rory
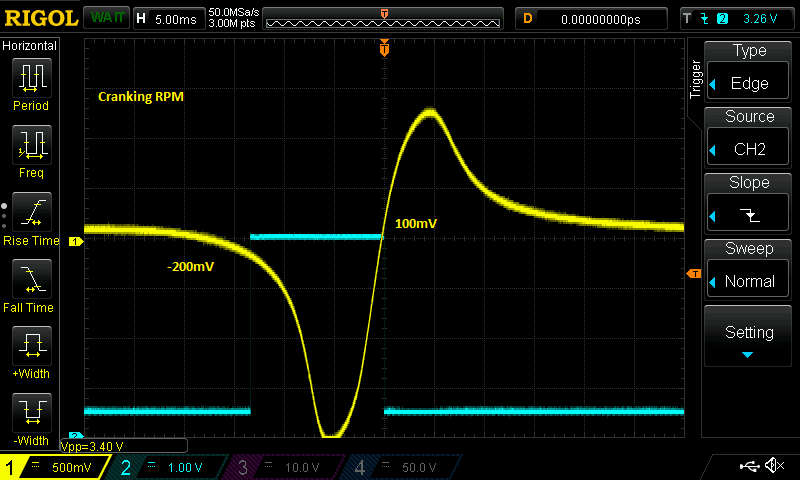
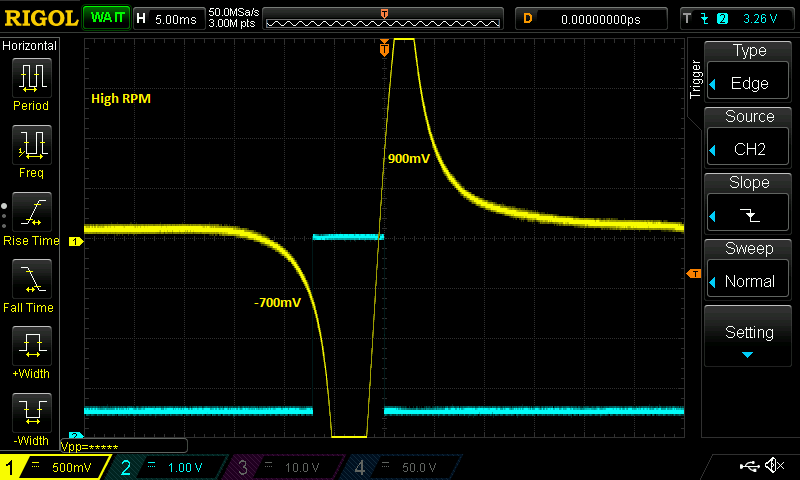
Hi David,
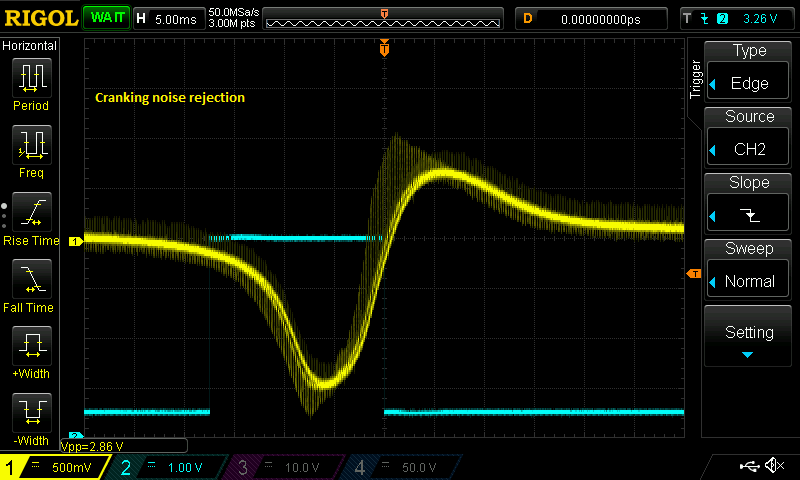
Sounds like ignition system electrical noise upsets the Arduino probably from your crank position input. Take a look at http://www.mdac.com.au/wp-content/uploads/2017/11/2CrankCamMultiInterface.pdf this is the crank/cam input circuit you might get some ideas how to low pass filter your inputs and add some hysteresis (aka Shmitt trigger) to avoid this problem.
Cheers and good luck