 Alvaro Ferrán Cifuentes
Alvaro Ferrán CifuentesWheelchairs are one of the most used accessibility devices worldwide, however, the prices for electric wheelchairs are still too high (starting at about 1000€) and they are certainly not open for the user to hack.
With this project we intend to build an open-source, affordable electric wheelchair the user can modify to suit their needs, something that while seeming obvious, is in a lot of cases impossible since the chairs are loaned by health services and users are not allowed to alter them.
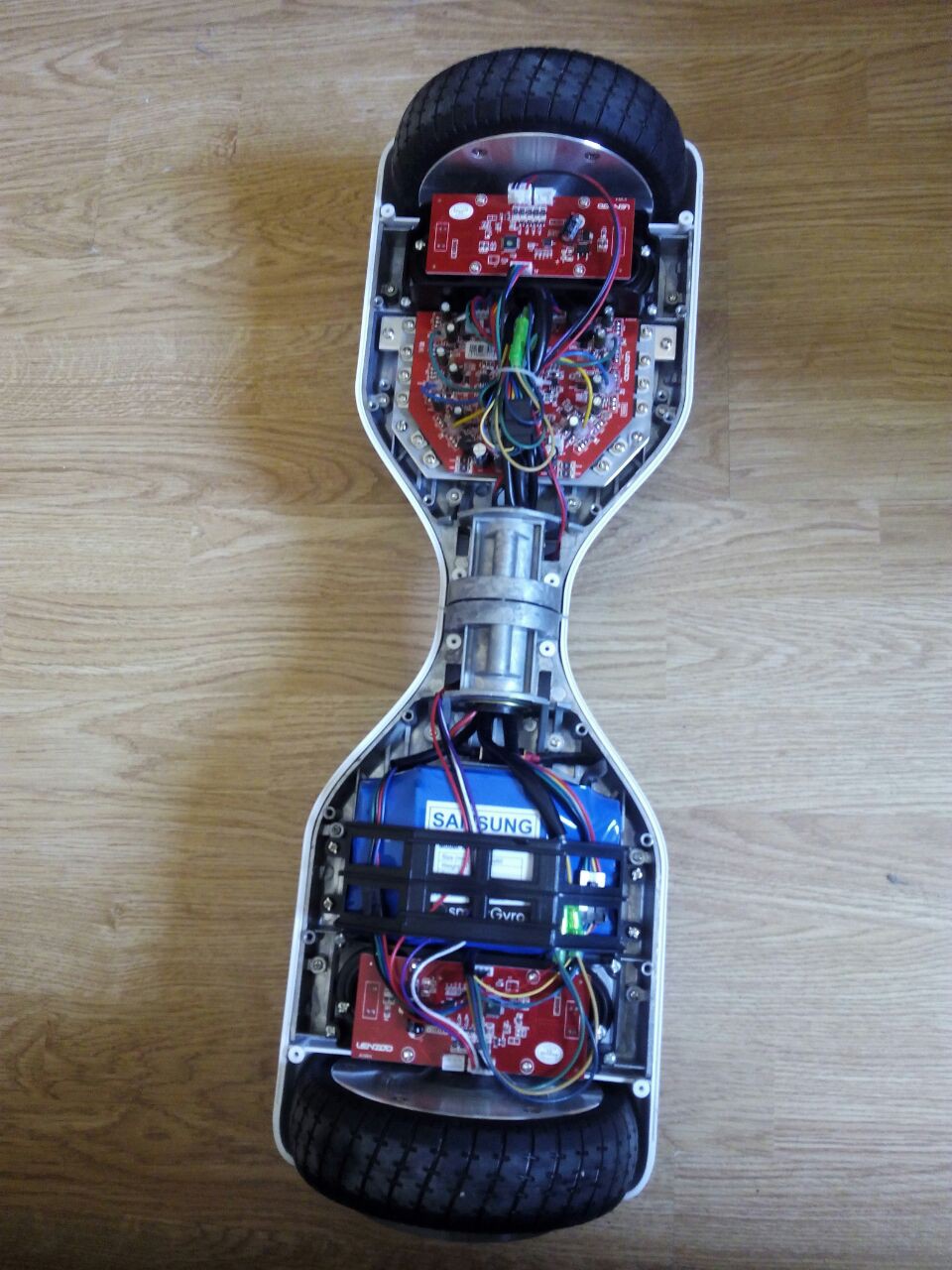
The first step was to get the electric part. After searching for a combination of motors, drivers and battery+charger powerful enough to transport an adult for more than ten minutes, we came to the conclusion that taking advantage of mass production was the smartest thing to do and went ahead and got a hoverboard. For about 270€ new (and with the huge number of sales, probably a lot less in a second-hand store) we got 2x350W brushless motors and a 36V 4400mAh LiPo battery with an autonomy of up to 20km per charge.
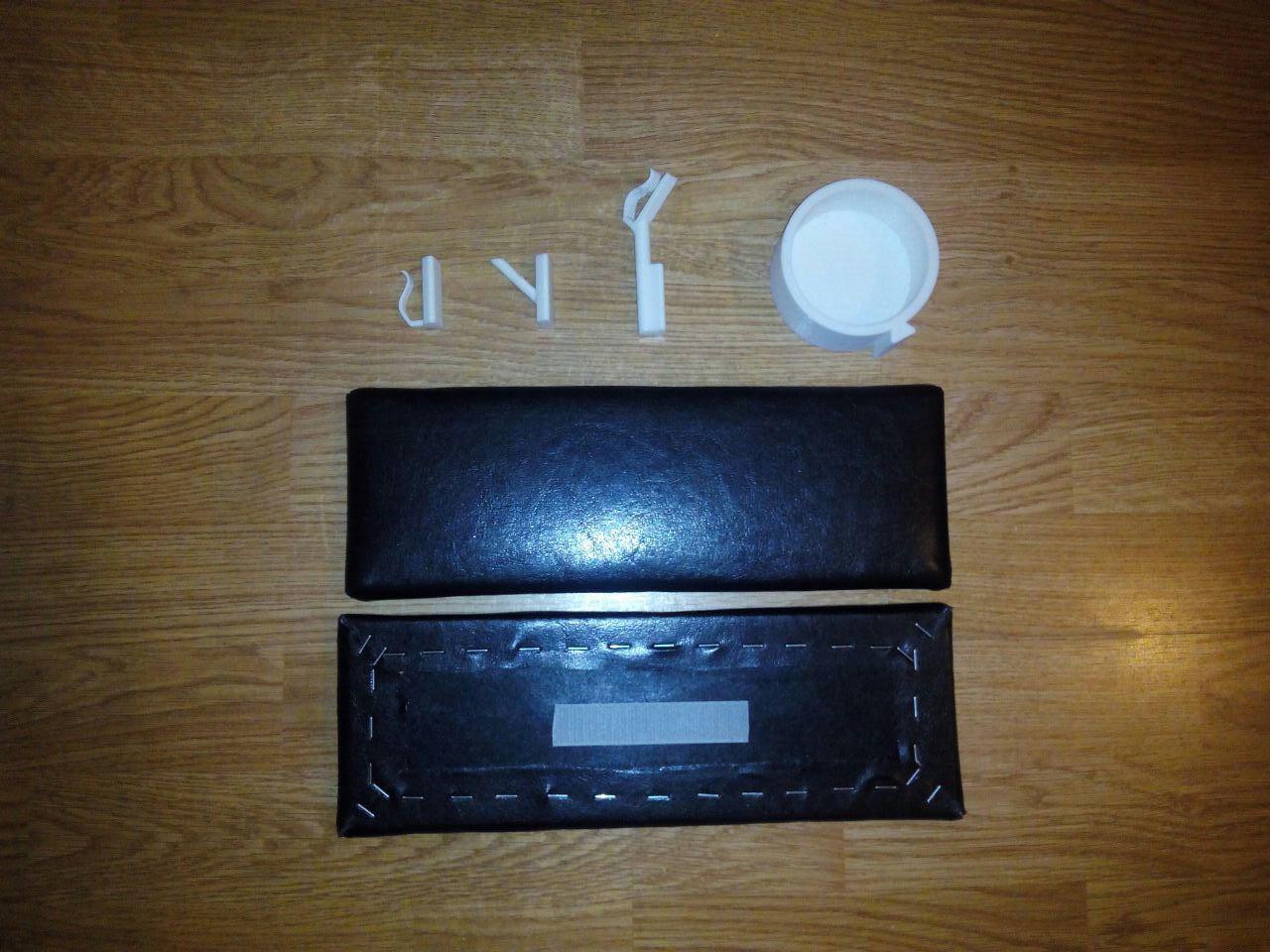
Once the motion was taken care of, we wanted everyone to be able to customize their chair easily, so apart from uploading all the source files we incorporated a set of slots into which a number of accessories could be slid. These could be anything from hooks to carry bags, drink holders, phone/tablet stands... or even active ones, such as a torch or horn. To this end, all the grooves have a hole through which the cables can pass and go to the controller board, effectively hiding them from view and keeping a clean look.
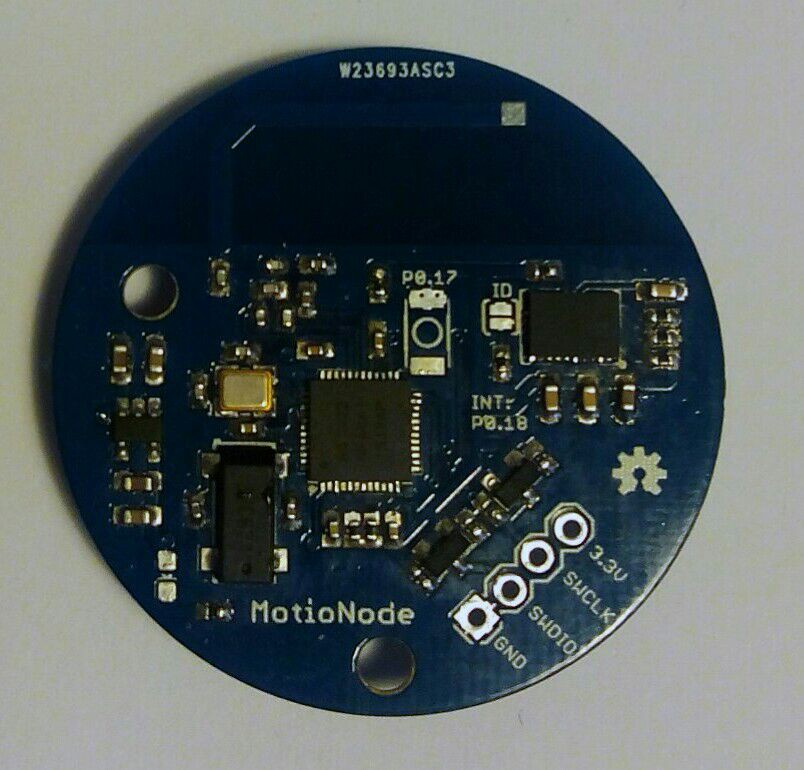
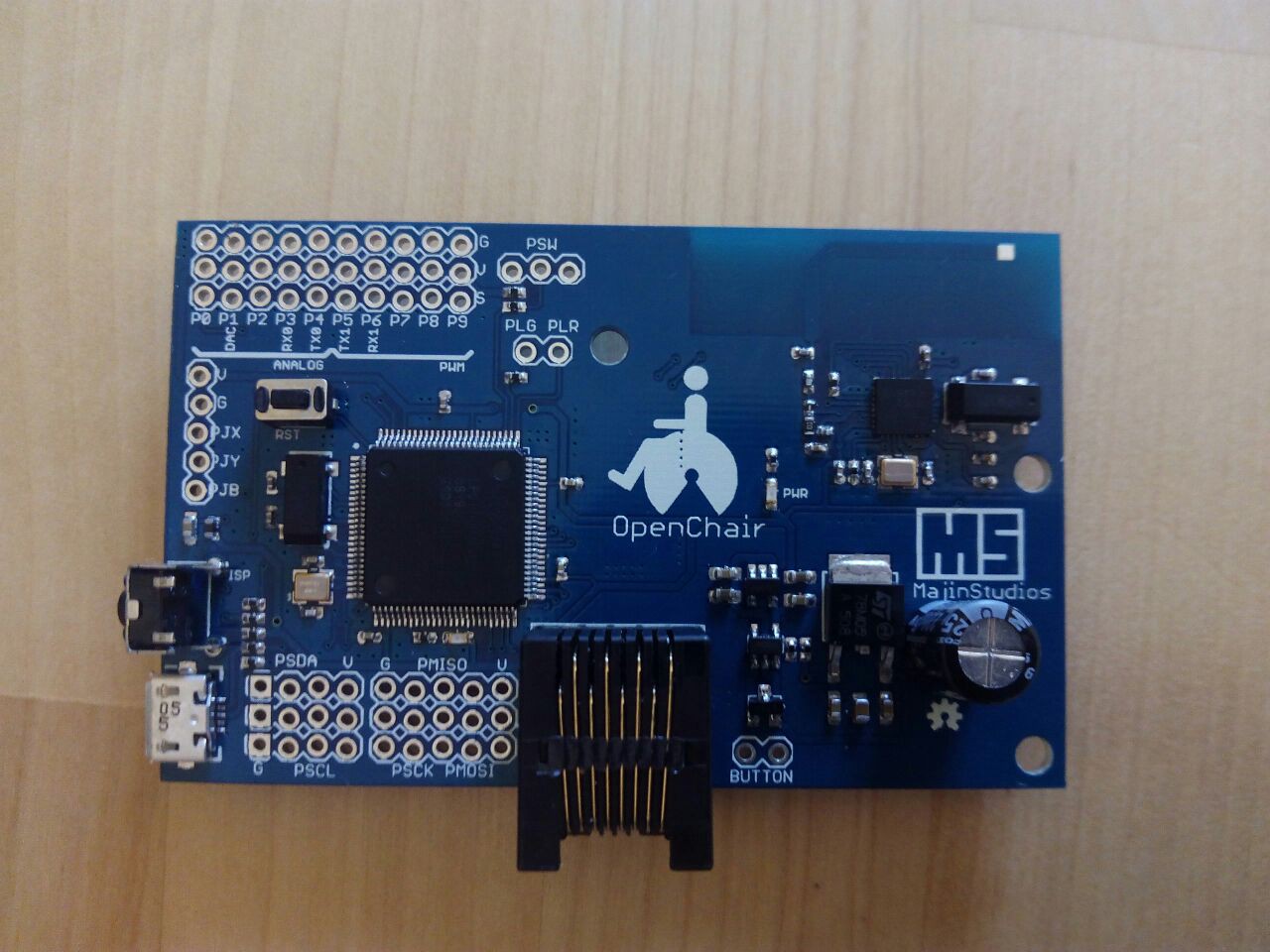
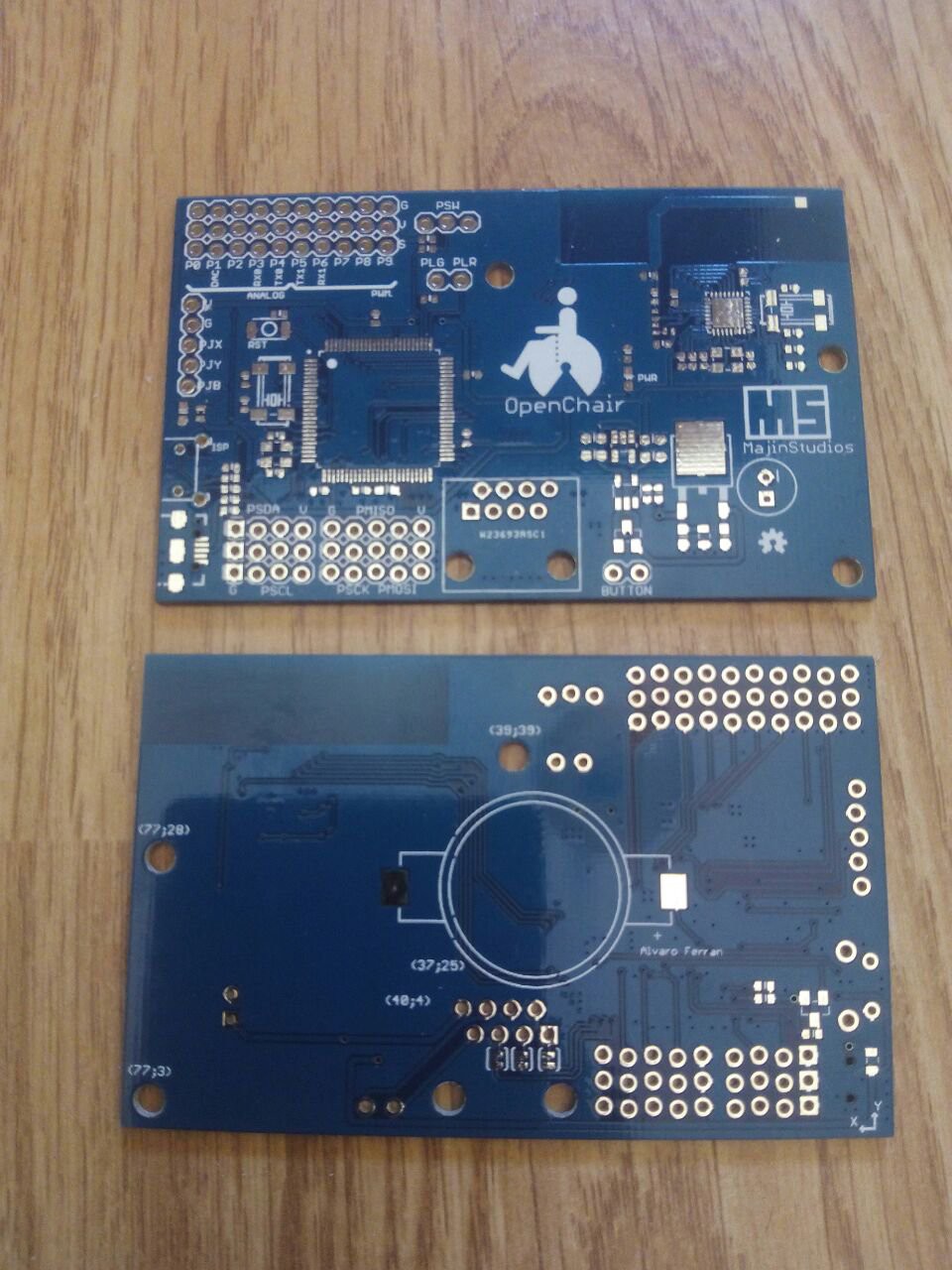
Finally, we are a using a Nucleo F446RE as the control board, but are currently working on our own board, based on the NXP LPC1768 and which incorporates a nRF8001 to provide BLE connectivity. This, in addition to the broken-out GPIOs and I2C, SPI and UART buses should give the user the ability to add any type of sensor or actuator to interact with the chair in the way that suits them best, be it from a board that sends commands based on a user's limb orientation, an eye tracking system, a sip-and-puff device, phone app or any other imaginable way of control that would make life easier.
Here is the project video:
This project is licensed under Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0) and currently under develepment, it is thus provided "AS IS", without guarantees and used at the user's own risk.















 After measuring everything, we cut the side holes for the motor and hall sensor cables with a 16mm spade drill bit and protected the cables from the sharp plastic edges with some rubber grommets of the same size.
After measuring everything, we cut the side holes for the motor and hall sensor cables with a 16mm spade drill bit and protected the cables from the sharp plastic edges with some rubber grommets of the same size.






 We decided that the driving wheels needed to be attached under the original ones, so all four rollers would be aligned and the chair would be able to pivot effortlessly. In the end however, we compromised and placed them a little behind the axis in exchange for a fastener with a simpler design, and thus stronger due to reduced stress points. The resulting piece is both simple to assemble and strong enough to support the wheel in the air.
We decided that the driving wheels needed to be attached under the original ones, so all four rollers would be aligned and the chair would be able to pivot effortlessly. In the end however, we compromised and placed them a little behind the axis in exchange for a fastener with a simpler design, and thus stronger due to reduced stress points. The resulting piece is both simple to assemble and strong enough to support the wheel in the air.








Very impressive to see this post I am also working on a similar type of massage chair project you can see here.