 EK
EKWhy does cutting food have to be a task that is difficult for some? We can do better- there should be a robot for this task. Similar to a kitchen appliance, one that people can place next to their microwave.
Here is an overview video about the project:
Here is the system diagram of the project:
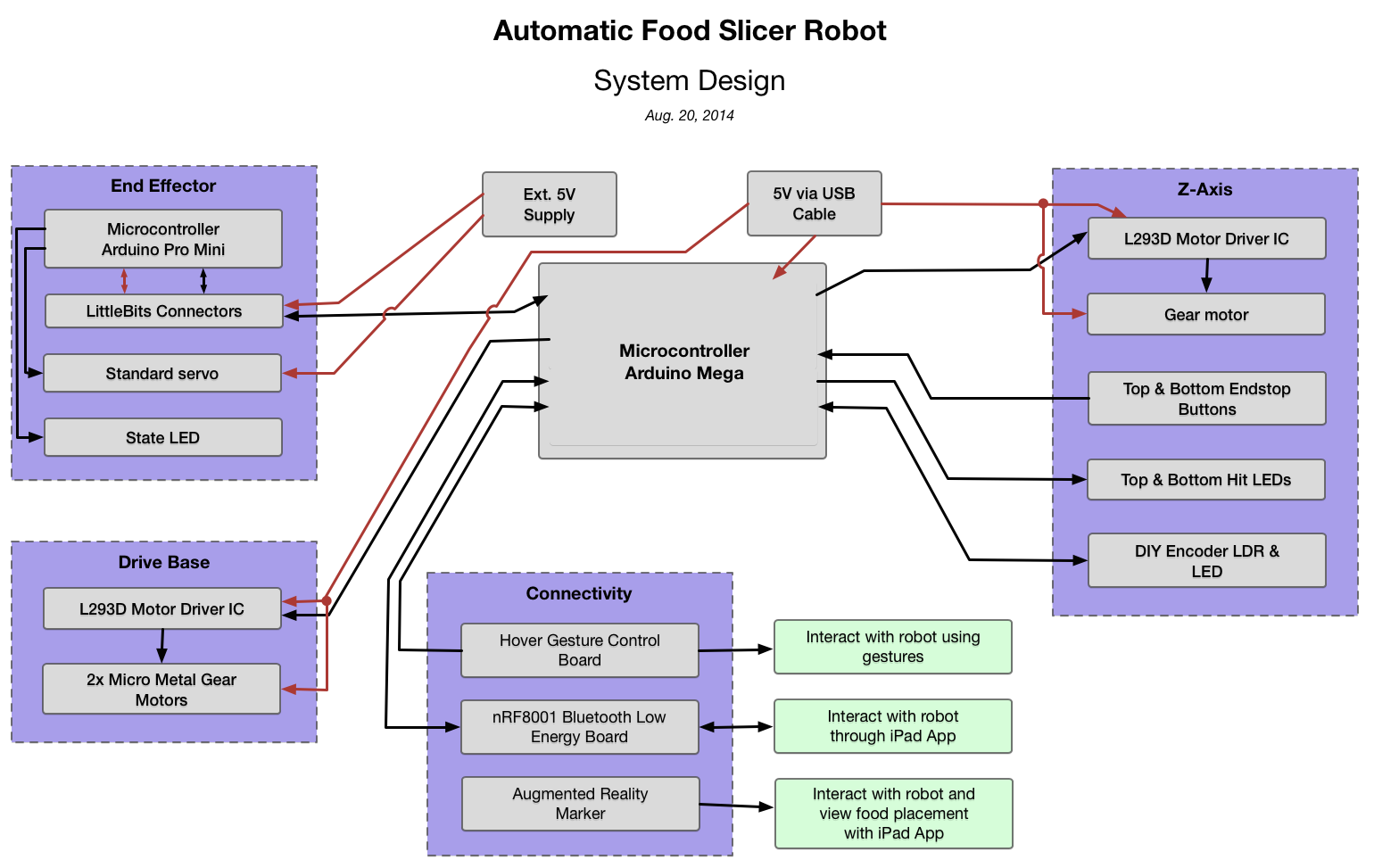
The cutting size that the robot can handle right now is ~6cm across, 3cm tall, and 10cm long.
Sub-Assemblies
Here are some of the sub-assemblies that will be used to create the entire robot.
Z-axis Carriage:
This is for the up and down movement for moving the cutting blade deeper into the food. It will need the most torque out of all the sub-assemblies. It has the end effector attached to it.
End Effector Attachment:
This is the main piece of the entire robot, the cutting blade. It will be the piece that will take much of the strain and be the most likely to break. At the same time, it has to be easily accessed for removal to clean it. This is attached to the Z-axis Slicer.
Chassis:
The outer structure of the robot. There will be enclosure doors will be attached, providing a necessary boundary between the user and robot when in use.
Cutting Table:
This will feature an area where you can remove the main cutting board for cleaning. It will rest on top of a table, which has force sensors between another table, to detect the weight of the food on the cutting board. This will all attach to the chassis for stabilization.
Electronics
For prototyping, the main controller is an Arduino Mega. We went with the Mega because of all of the pins. As the project progresses, this may change to a Beaglebone Black for having a potential web interface to raw data logs.
The motors are small hobby DC motors with plastic gearboxes. They do not come with encoders, but I will make my own using a disc with alternating coloured lines and a light sensor. A L293D will be used to control the DC motors.
The sensors under the cutting table will be DIY force sensitive resistors. Using conductive foam between two pieces of cardboard covered with aluminum tape.
The enclosure doors will use a simple button to tell if they are in place or not. A more advanced version could use IR proximity sensors mounted on the top of the chassis (pointing down), to make sure nothing crosses its path.
Interface & Connected Device
Currently we can interface with the robot through a gesture controller and an iPad App. With the app, you can switch to the Developer tab, and press buttons that control the robot as well as read its sensor outputs.
The "swipe to slice" feature is in development. We're working on the augmented reality tracking, so the app will know where the food is in relation to the robot, for when the user swipes the food.
We envision the future of this app to be similar to an assistant, but for your food and diet. You will be able to enter in what food you are eating. The robot will automatically weigh it, and display the result. From there, it will give an estimate on the calories and nutritional values. These values will be saved in history, where you can view them over time.
As a connected device, the app will be able to fetch recommended meal ideas to go along with the food you are slicing. You will be able to save / favourite the recommendations for later viewing. There will also be social sharing, so you can tell all your friends about the delicious steak you are about to enjoy.
Safety Concerns
There are several safety concerns with a robot that is capable of cutting and handles food.
Enclosure:
There will be sensors on the enclosure doors. If the door opens while the robot was cutting, the motors immediately stop.
Emergency Stop Button:
This will be a big, red, button that can be pressed to disengage the motors. It will be located on the remote of the AFSR.
Cleaning End-effectors:
The cutting blade will have to be cleaned regularly. Much of the robot is designed around this fact. The end effector will be easy to take out, clean, and replace.
Removable Cutting Table:
The cutting table will...
Read more »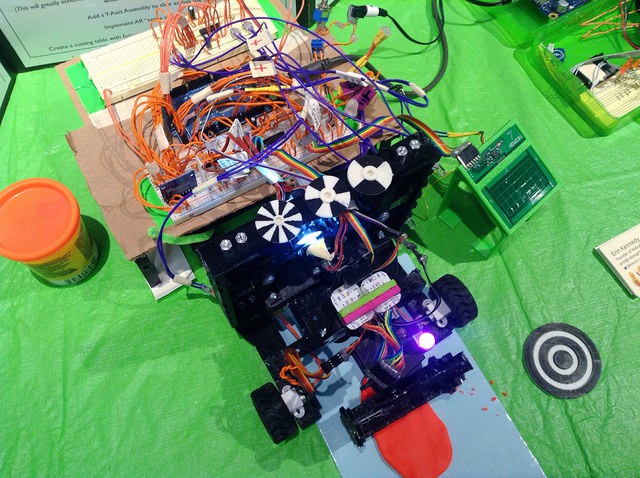







 Roger
Roger

 Joshua Elsdon
Joshua Elsdon
 Irene Sanz
Irene Sanz