 Kevin
KevinFirst of all, lets learn some words so we know what the heck I'm talking about:
- FPV: First Person Video
- PWM: Pulse Width Modulation (Its a signal that controls the speed of a motor)
- ESC: Electronic Speed Controller (These guys take the PWM signal and use it to control the motors)
- IMU: ??? (A board with an accelerometer, gyroscope, compass, and maybe altitude sensor)
Goals:
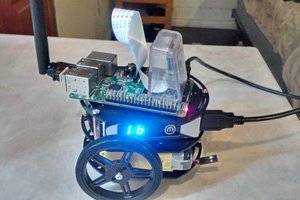
The original goal was to make a drone out of standard FPV racing parts and to replace the control board with a Raspberry Pi and IMU. This has proven to be much more difficult then I previously anticipated. Nevertheless I'm slowly pushing onward and someday I'm gonna get this dang thing in the air.
For now here are the major stepping stones in this project:
Now at this point I should have a complete working drone but I didn't use a Pi zero for nothing. Here are the things I plan to do afterwards. Keep in mind some of these things are pretty advanced. I'm not sure how far I'll get but I gotta try.
- Buy IMU
- Program IMU to modify PWM
- Create some kind of machine learning program to recognize flight patterns
- Buy Pi camera to record FPV
- Setup slow motion for awesome slow-mo shots
- Add WiFi dongle to Pi
- Connect Pi to phone to quickly adjust settings
- Use camera for computer vision
Everything you seen in green is already completed. Currently I am gathering all my old photos, notes, code, etc. and soon I will be posting a great big update log to get this project page up to speed.
 Brenda Armour
Brenda Armour
 TK
TK
 Sean Hodgins
Sean Hodgins
 Davidian
Davidian
for flight pattern recognition, using tensorflow might help