 Mike Turvey
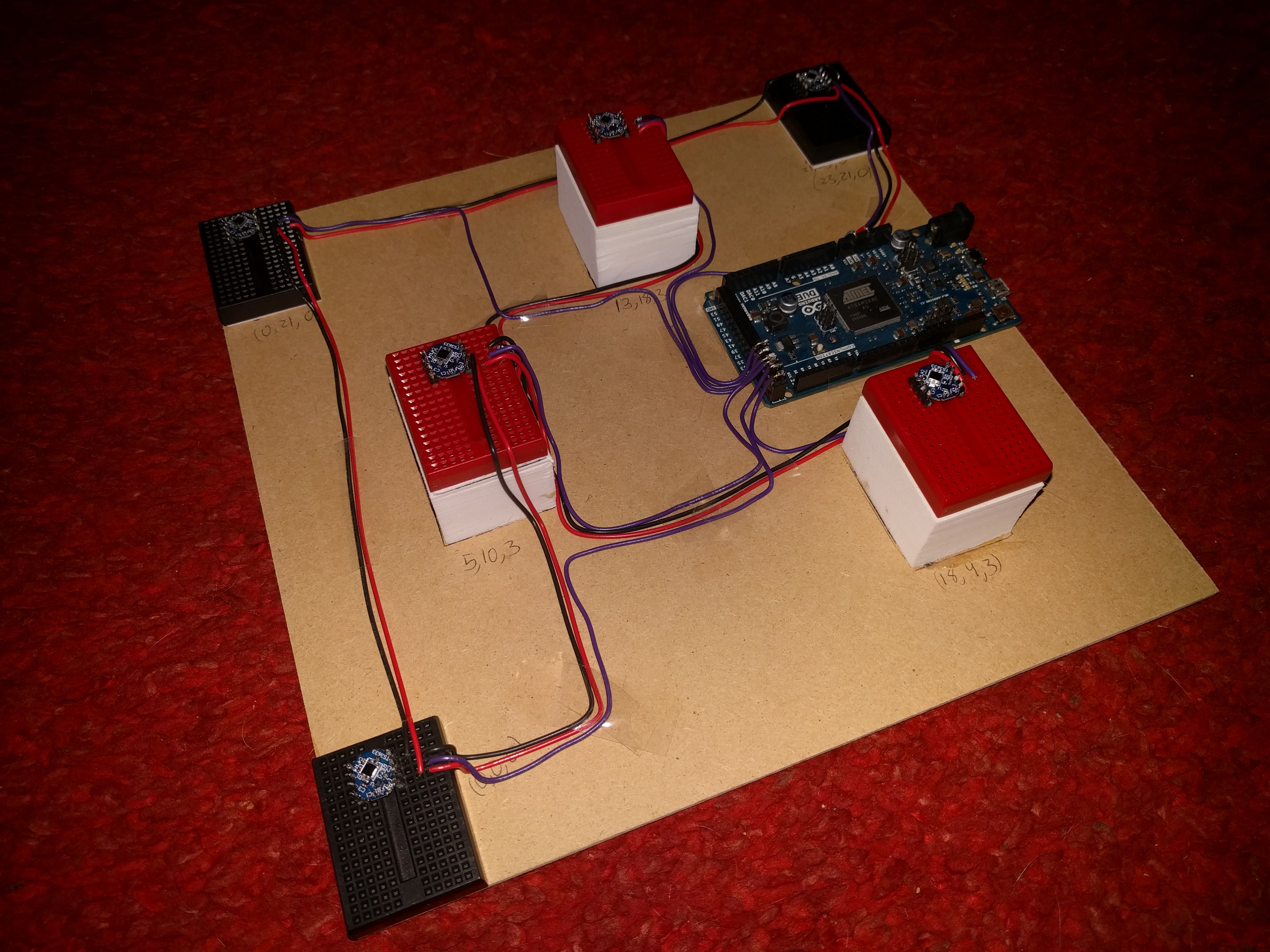
Mike TurveySince I was able to get one sensor working really well, it was clear that the next step is multiple sensors. I've built a rig with 6 sensors. I'm not sure of all of the math yet, but I'm pretty sure that it is important to avoid more than 2 points being on a single line and more than 3 points existing on any plane.
In expanding the code to support multiple sensors, I seem to have introduced a few bugs. Need to fix them before I can reliably get angular positions from all the sensors.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.