 Giovanni Leal
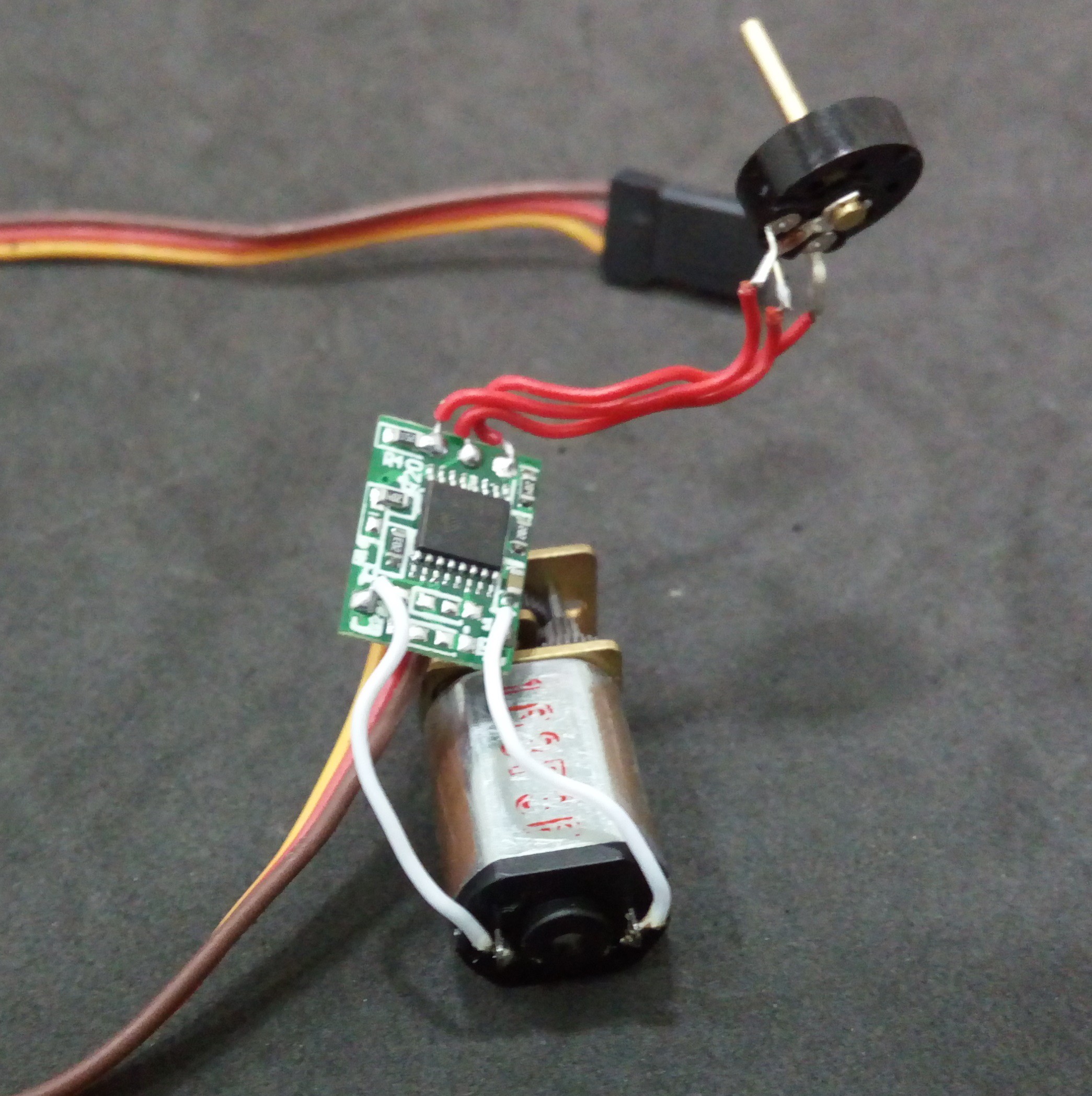
Giovanni LealAssembling process
We hope to improve it and keep it to the bones so other can implement it, sugest improvements and make something useful together
Schematics

Licensing
As everything on Hackaday, all that is published here is for grabs and to make your own. If you plan to sell it, please make it really different or had functionality to it. We know all of that its obvious and already written but we wanted to say it explicitly.












 Sam Ettinger
Sam Ettinger
 Joan Horvath
Joan Horvath

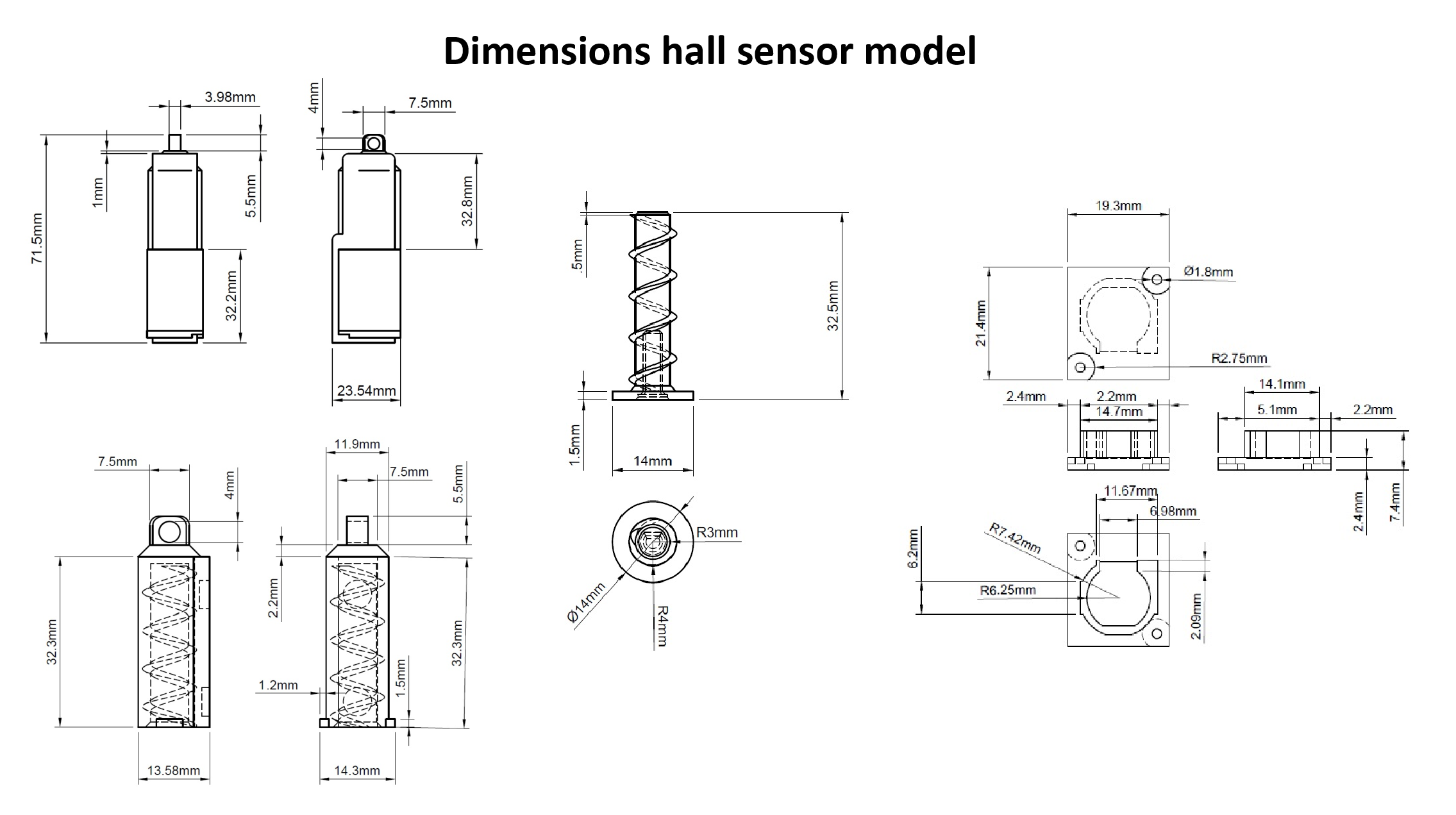
Hi, do you have files for the hall sensor model ?