 ottoragam
ottoragamOver the last few years, various pieces of gear, useful for building electronics and robotics projects at home have become very affordable. Electronics test equipment, 3D printers and capable single board computers are now affordable enough to justify buying them for personal use. However, one device with the potential of making electronics more accessible to many people has not reached this level of affordability yet: the pick and place machine.
Some open source pick and place projects have already been developed, but they lack commercial availability, they don't fully automate the PCB assembly process (thus limiting the amount of work the machine can do before operator involvement is required), or they're simply not cheap enough.
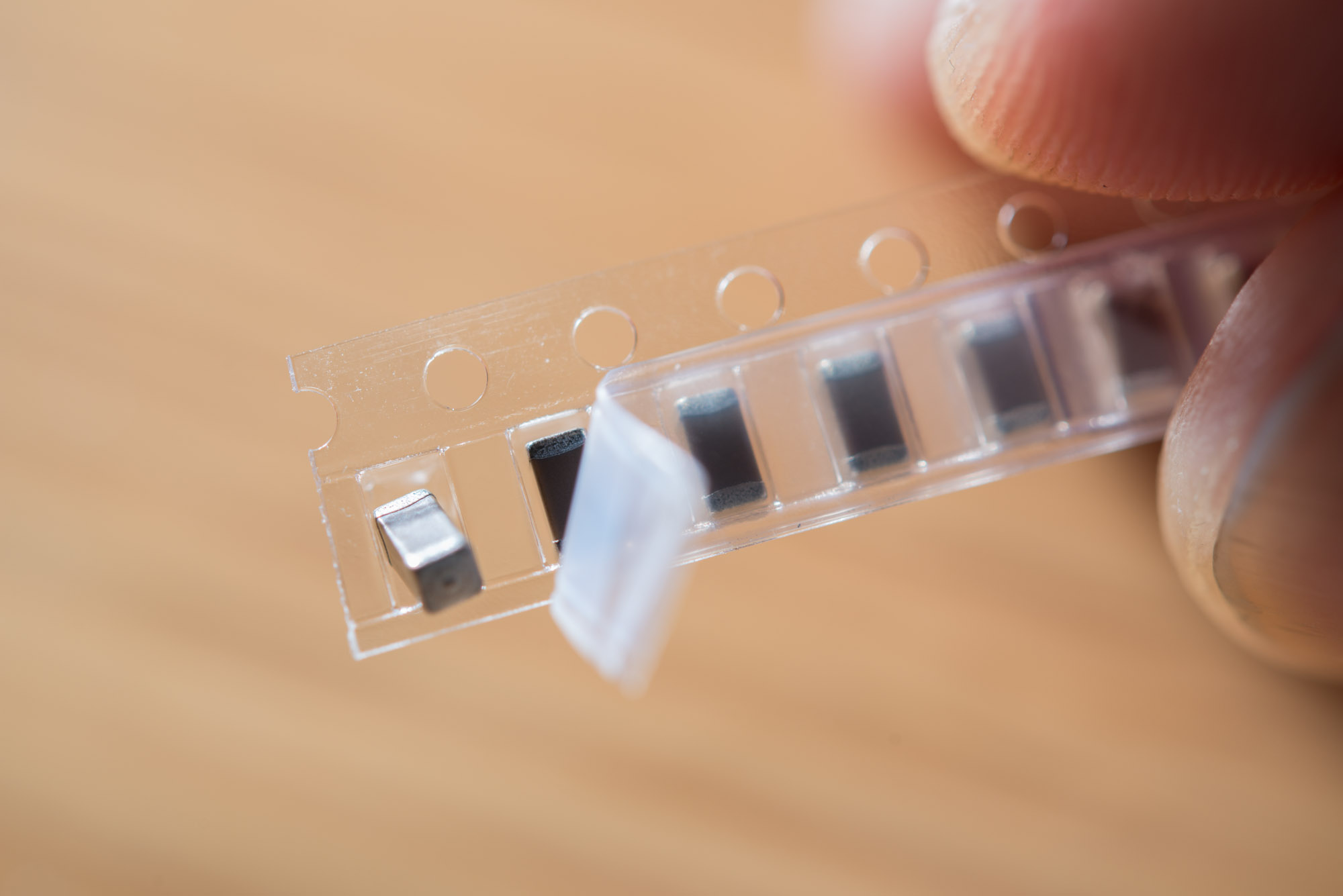
I believe that making this advanced prototyping and assembly tool available at a lower price point can enable a more complete electronics engineering learning experience, by allowing the students to understand and practice a part of the PCB volume manufacturing process. It also encourages electronics experimenters to use smaller and more complex SMD parts, and can be used by small businesses to satisfy their production needs.
My end goal is to create a fully featured pick and place machine at the mid range hobby 3D printer price point, that supports at least 20 automatic tape feeders, with closed loop control of every motion related component.
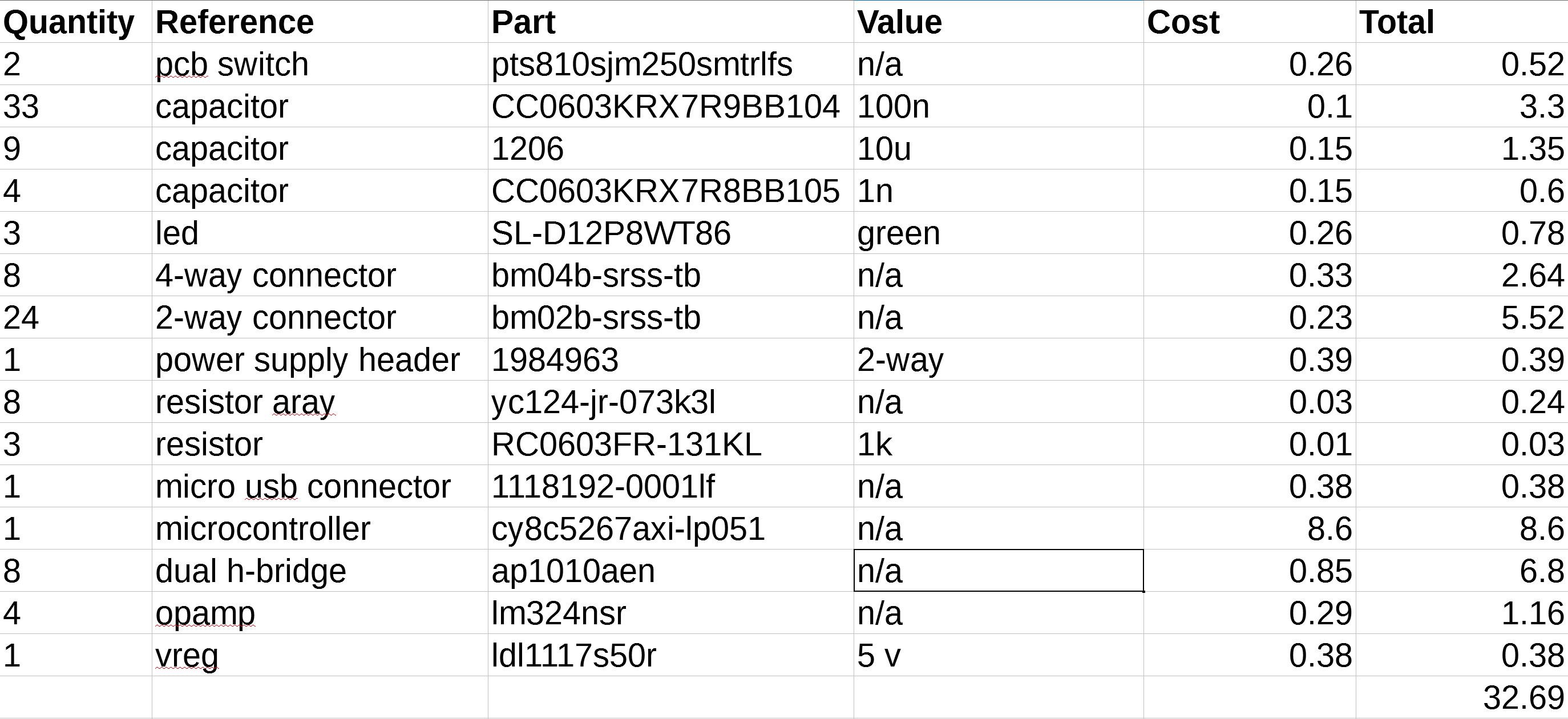
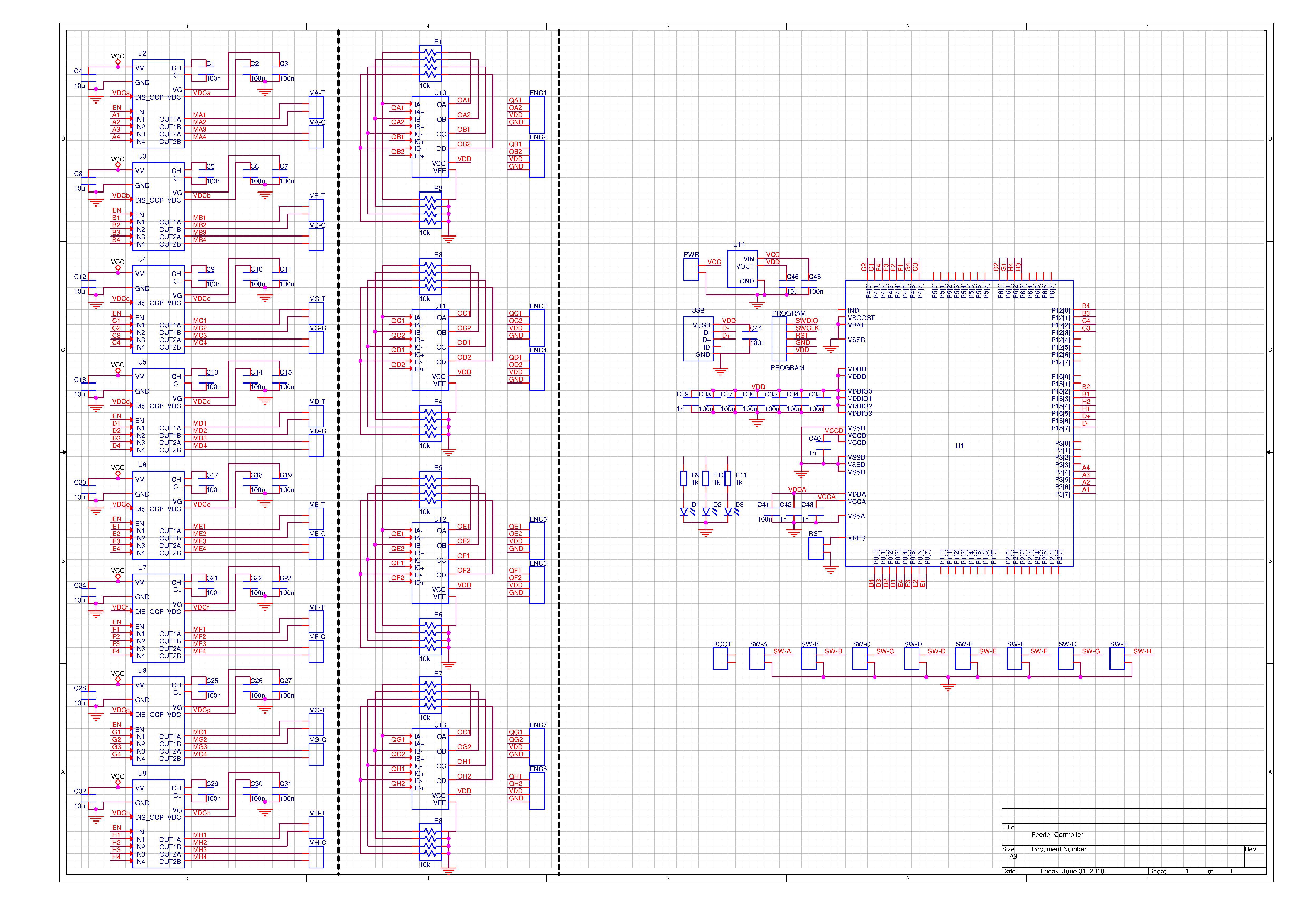
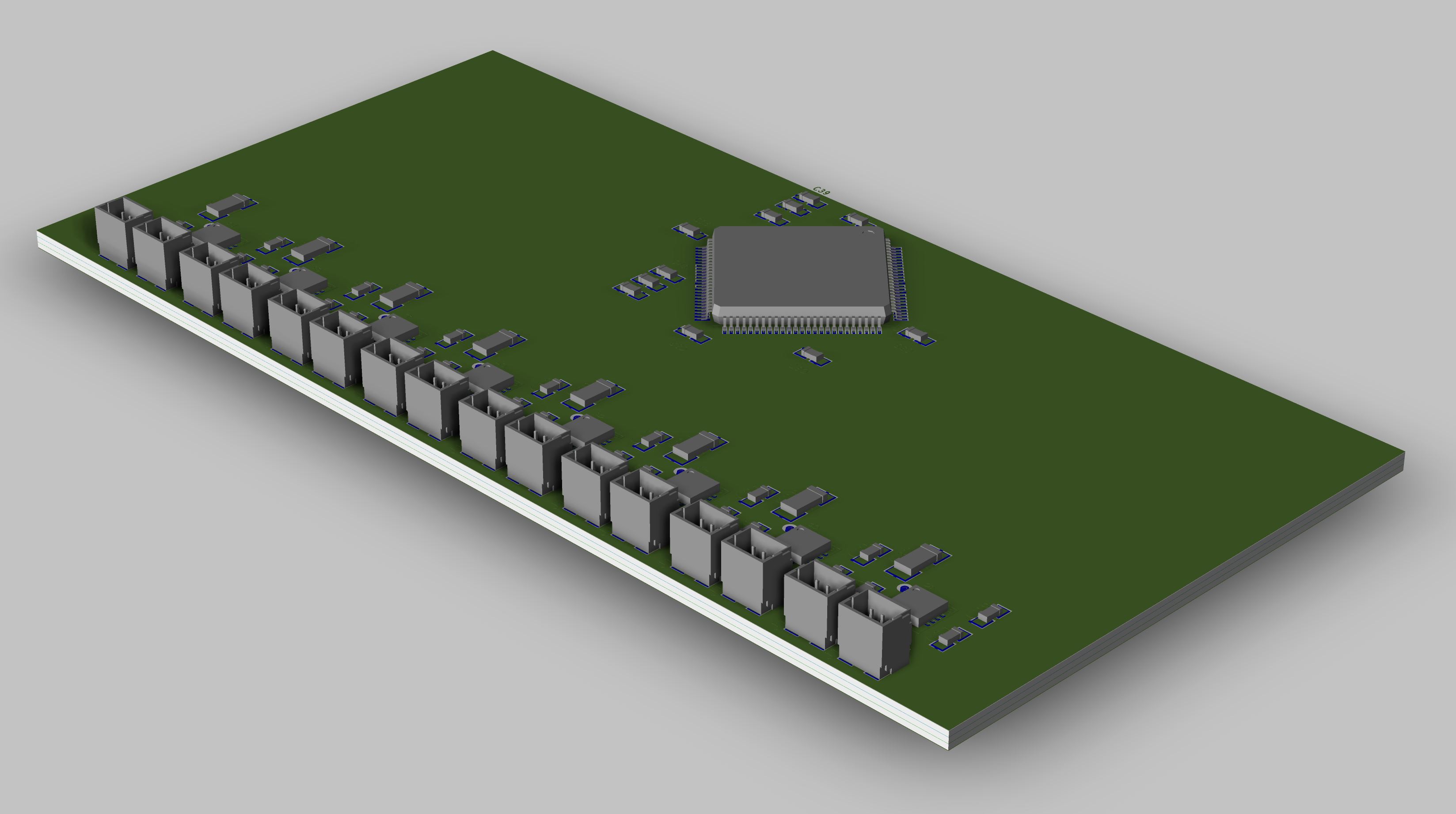
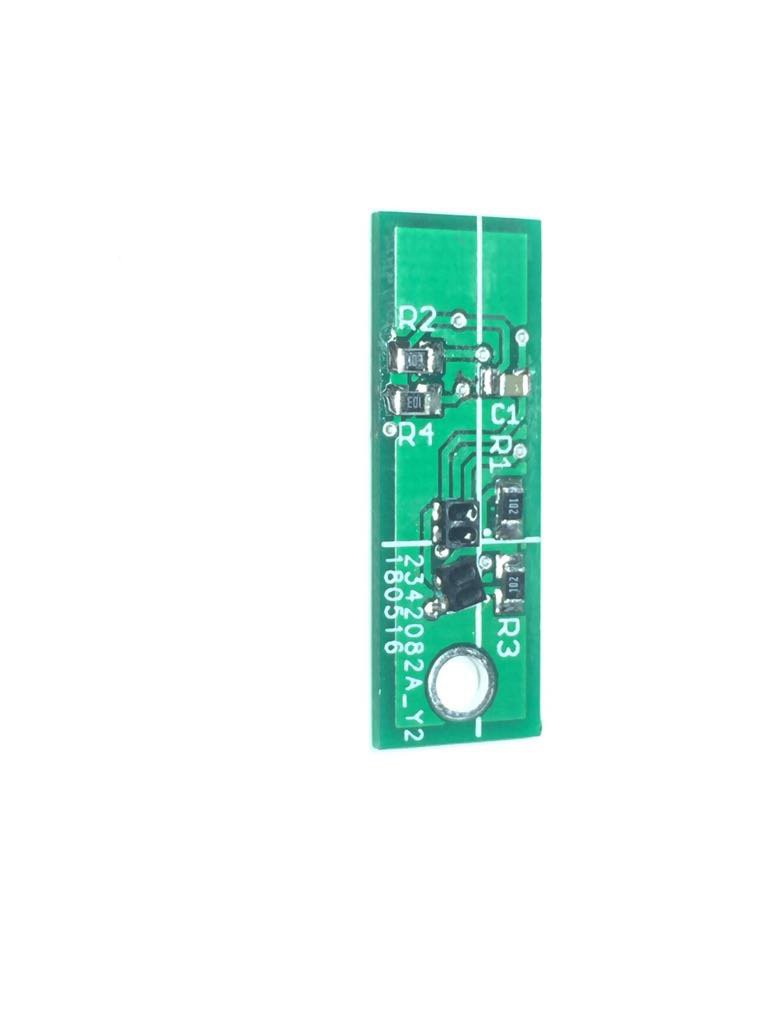
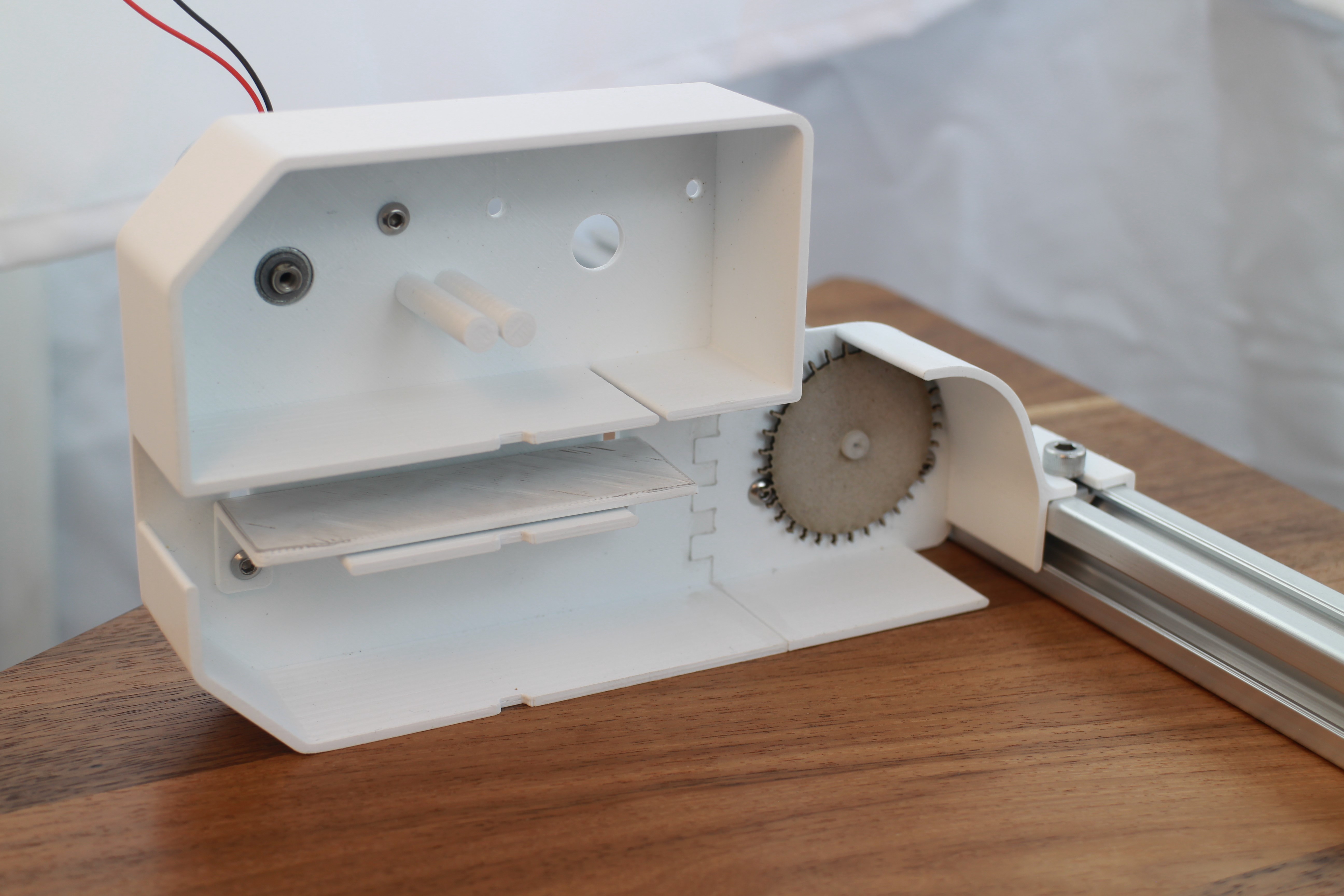
Tape feeders represent a big part of the final cost of the machine and are the part that benefits more from a modular design, as they need to be easily loaded and unloaded from the machine to use different components, and several of them need to be fabricated and used together, which is easier and cheaper if they're self contained as a module. This is why I think this project is an appropriate entry to the Hackaday Prize 2018 contest.




 Alex
Alex
 Miroslav Zuzelka
Miroslav Zuzelka
Please go look at this person's design:
https://docs.mgrl.de/maschine:pickandplace:feeder:0816feeder
I feel they have already solved the issue of a simple and cheap PnP feeder, but maybe you can improve on their design?