System Diagram
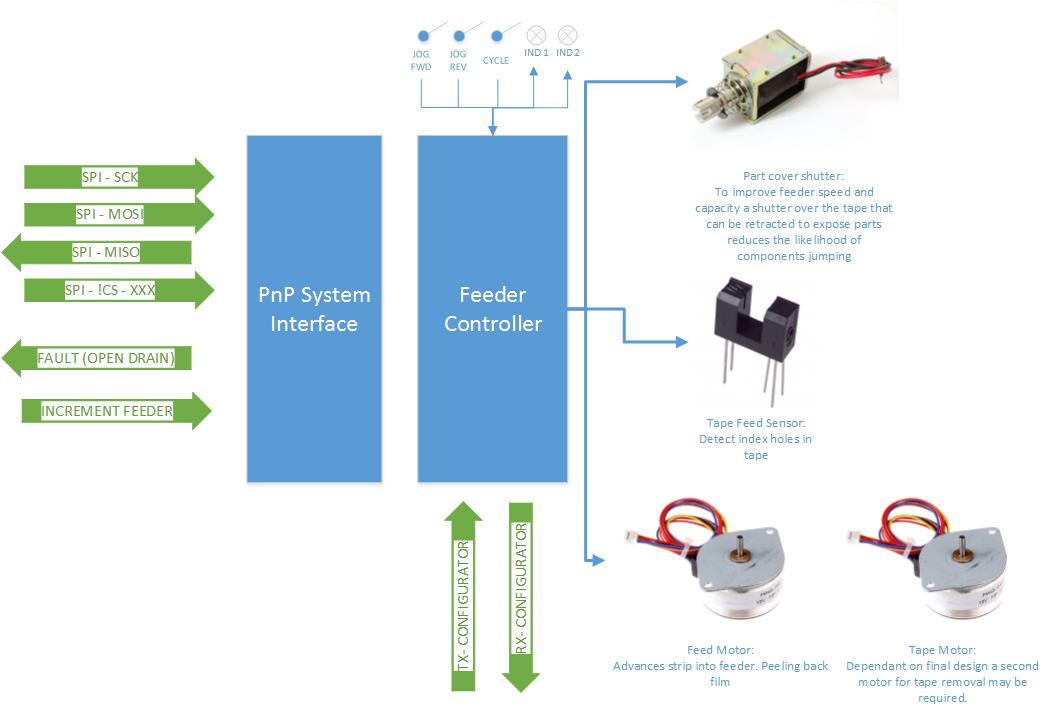
This system diagram highlights the components and communication required for each openPnP feeder.
License
DO WHAT THE FUCK YOU WANT TO PUBLIC LICENSE
Version 2, December 2004
Copyright (C) 2014 Andrew Van Dam
Everyone is permitted to copy and distribute verbatim or modified
copies of this license document, and changing it is allowed as long
as the name is changed.
DO WHAT THE FUCK YOU WANT TO PUBLIC LICENSE TERMS AND CONDITIONS FOR COPYING, DISTRIBUTION AND MODIFICATION 0. You just DO WHAT THE FUCK YOU WANT TO.


 Nishant Agarwal
Nishant Agarwal
 Karsten Fuhst
Karsten Fuhst
 MaximumMark
MaximumMark
 Victor Dedios
Victor Dedios
I like your licence agreement and the fact that hackaday allows some of the more esoteric anglo-saxon words!