 Victor Serrano
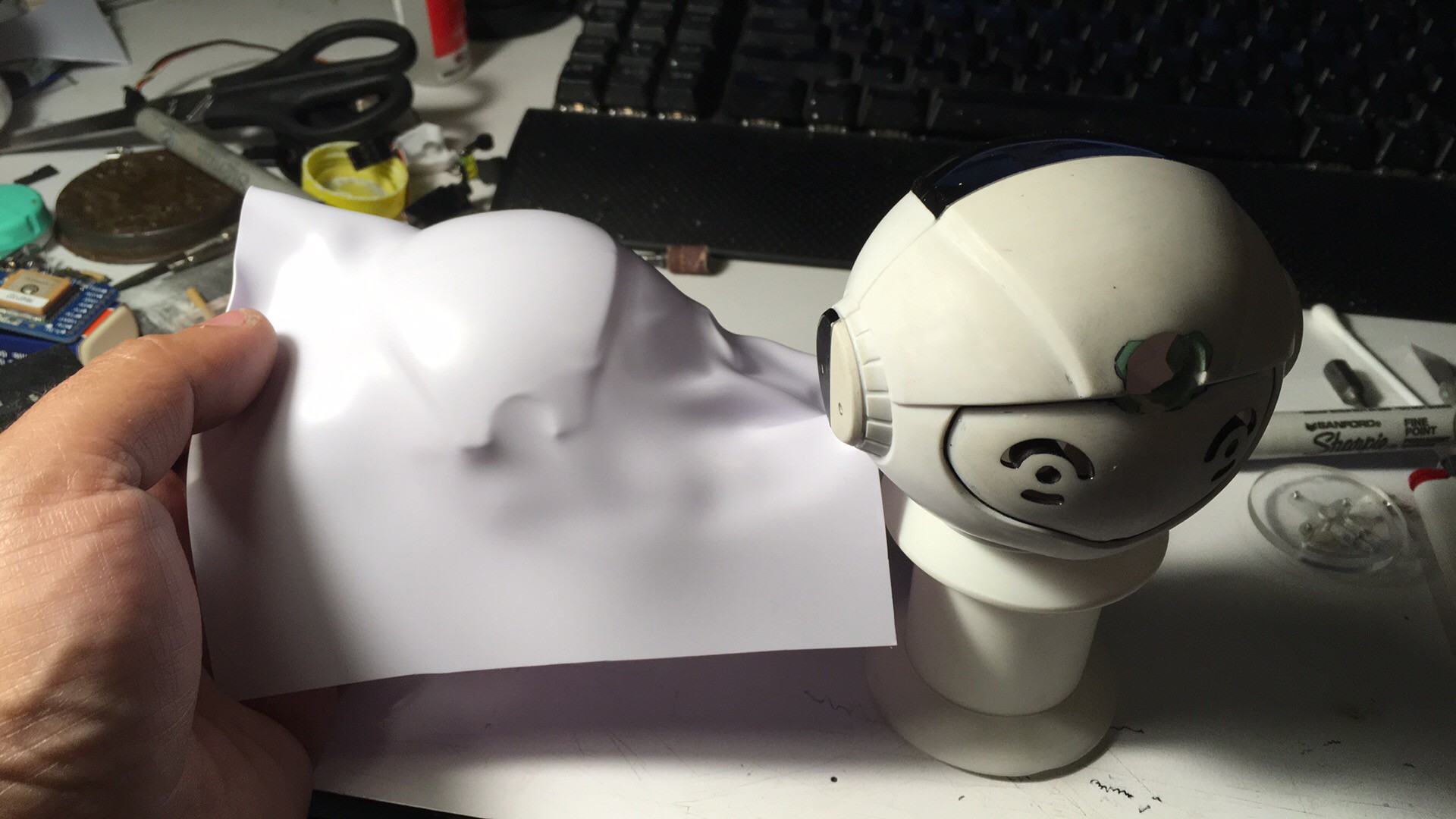
Victor SerranoDroid trooper is a robot based on Kib robot chasis as showed in building section.
Now, before starting in details, let me show you some features of the robot:
This video is new, it shows how the video system on the robot will shot an object and generates a Star Wars laser type gunshot
In this video we can see how fast the video system can follow an object
This video is a small preview of the behaivior and "temperament" of Droid Trooper
The main idea is to shot those rebel robots... =O)
In this video we can see how the robot tracks autonomously an object
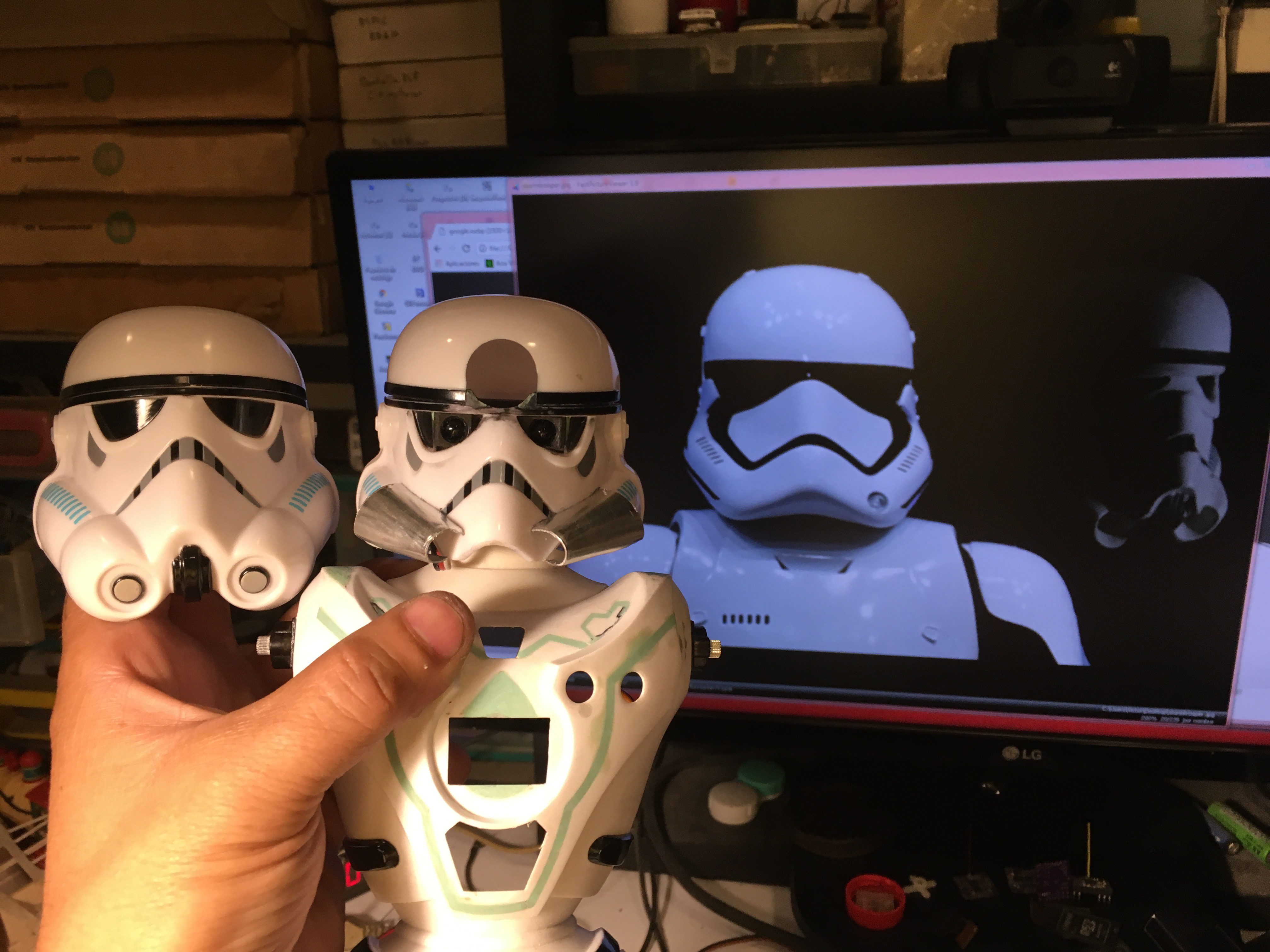
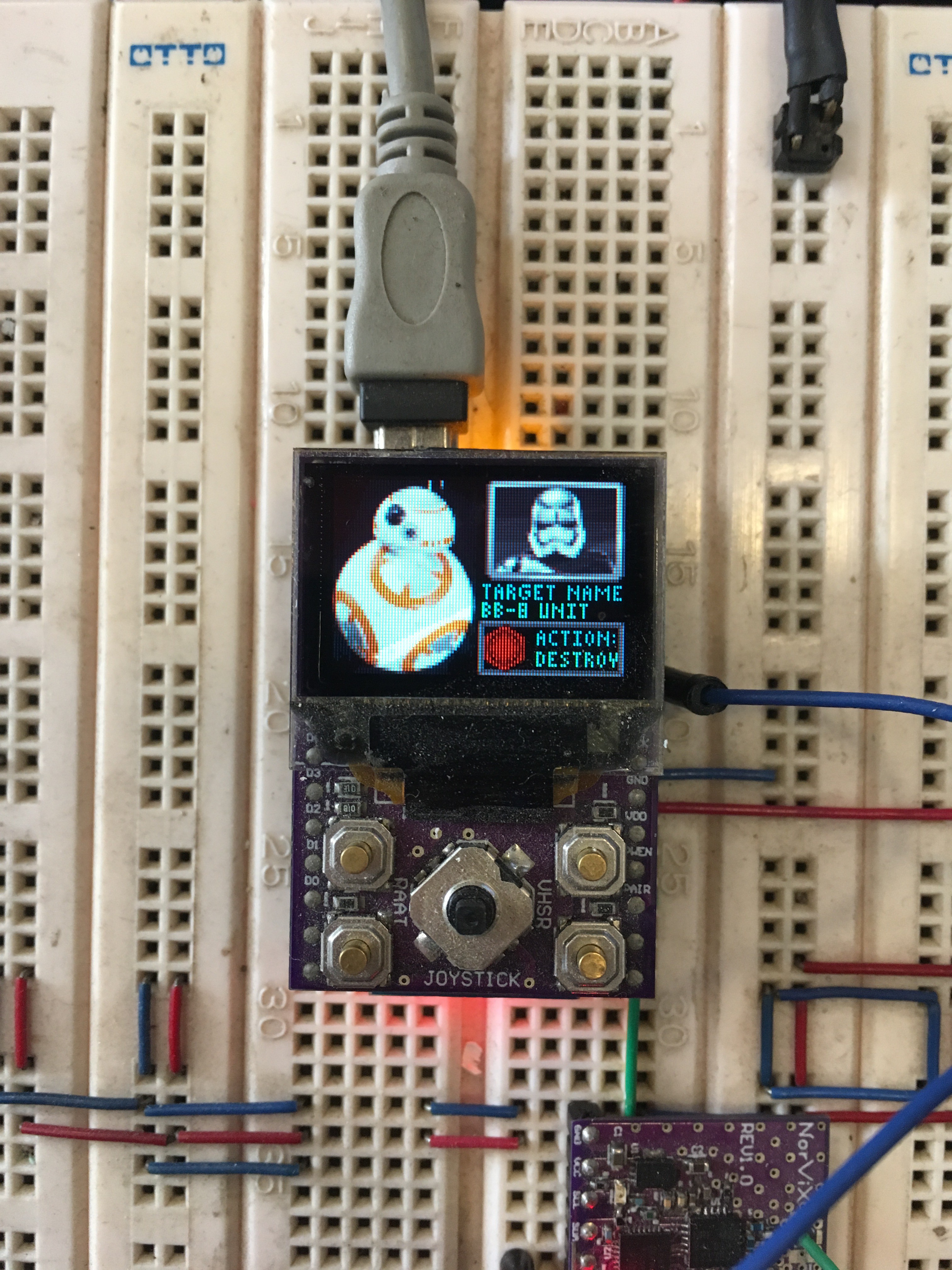
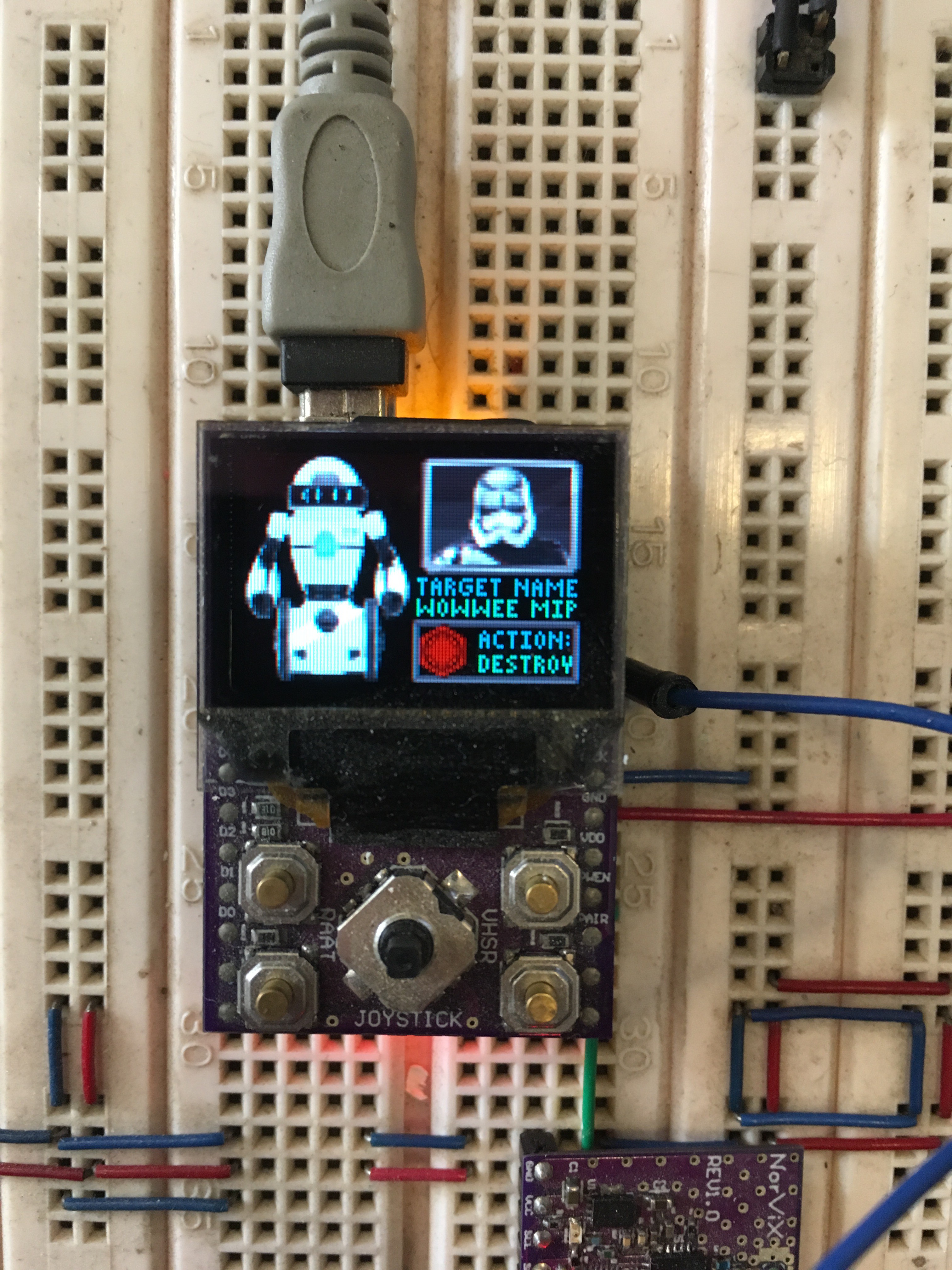
This is how the robot "see" an object
Now, the interesting part:
Originally, Kib robot is based on ARM cortex 0 and uses some wireless chip in 2.4 Ghz to use it by remote control. But the balancing control really sucks, it's worst than Mip balancing robot...
I wanted to control the robot in 3 ways:
1.- The robot must be autonomous and have it's own decitions for: Navigation, behaivior and seek objects
2.- The robot can be programed by blocky or anothe simple and graphical language
3.- The robot can remotely be controled using a FPV visor
Using FPV control requires that the robot stays still as much as possible, this is because one can get dizzy easily, and original balancing mode looks like a super drunk guy, so, thats why I discarded the original PCB with ARM cortex 0 and instead re-design everything: Electronics, PID control for self balance, wireless communications, sensors, artificial vision etc.
So, for the electronics, I design a board to control all what the robot needed:
8 I/O ports to control servos
5 I/O asigned to ADC, mainly used by distance sensor and battery level
2 H bridges with 3 Amp RMS to control each motor
2 Timer imputs to receive wheel encoders
1 Buck converter to provide enough current to servos and electronics systems.
4 I2C pin ports to conect IMU MPU6050
2 UARTS to control wireless comunications
128 KB SPI RAM
8 MB FLASH RAM for program data
1 RTC to keep traking of time
1 Connector to ViXion Cam
1 Serial connector to add Nordic NRF24L01+ or ESP8266
So, I started from 0, designing the PCB in protel with al these specs
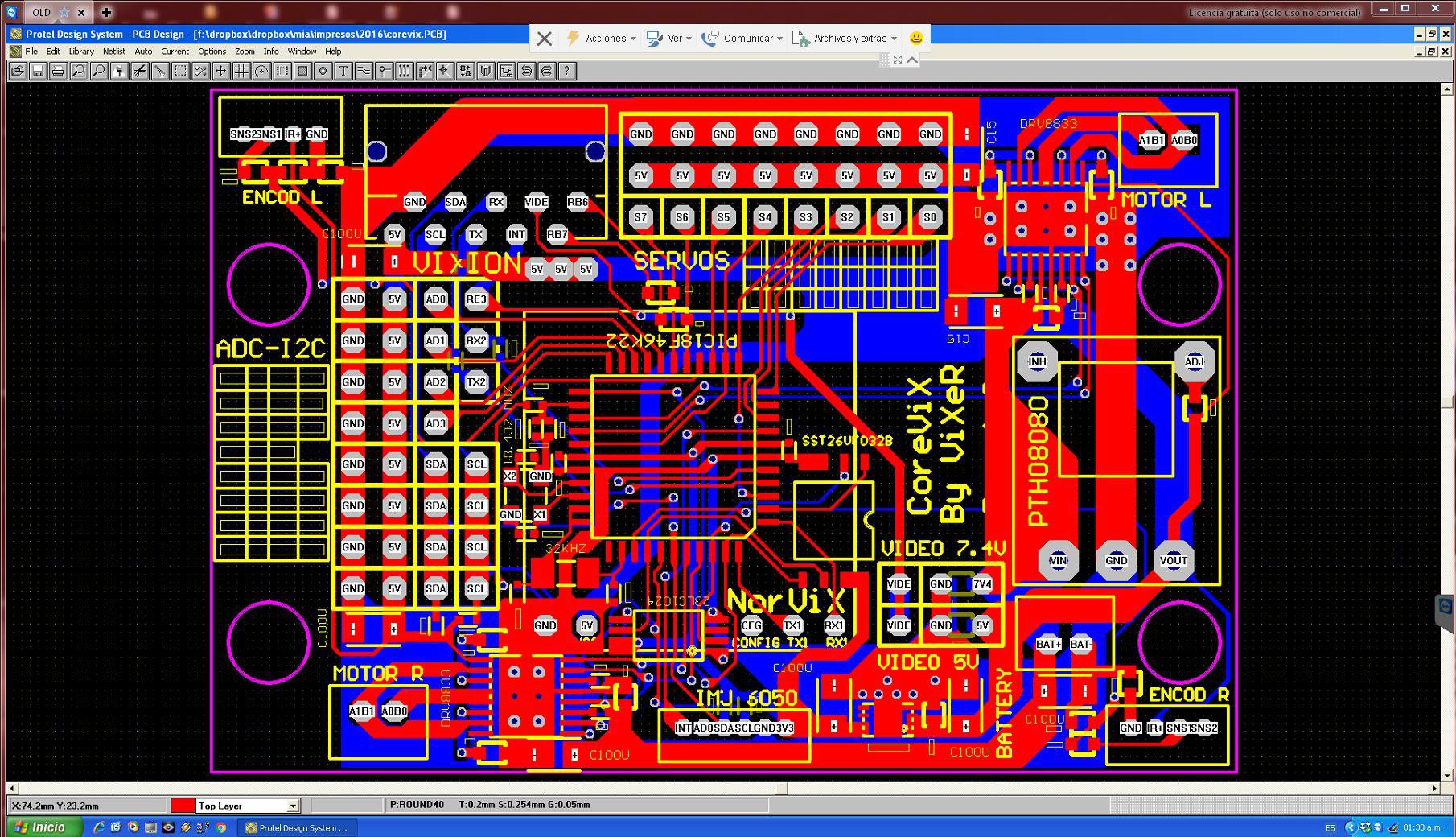
And here is a time lapse designing the board CoreVix
Once the design was finished, and after waiting 2 weeks, the PCB boards from china arrived...
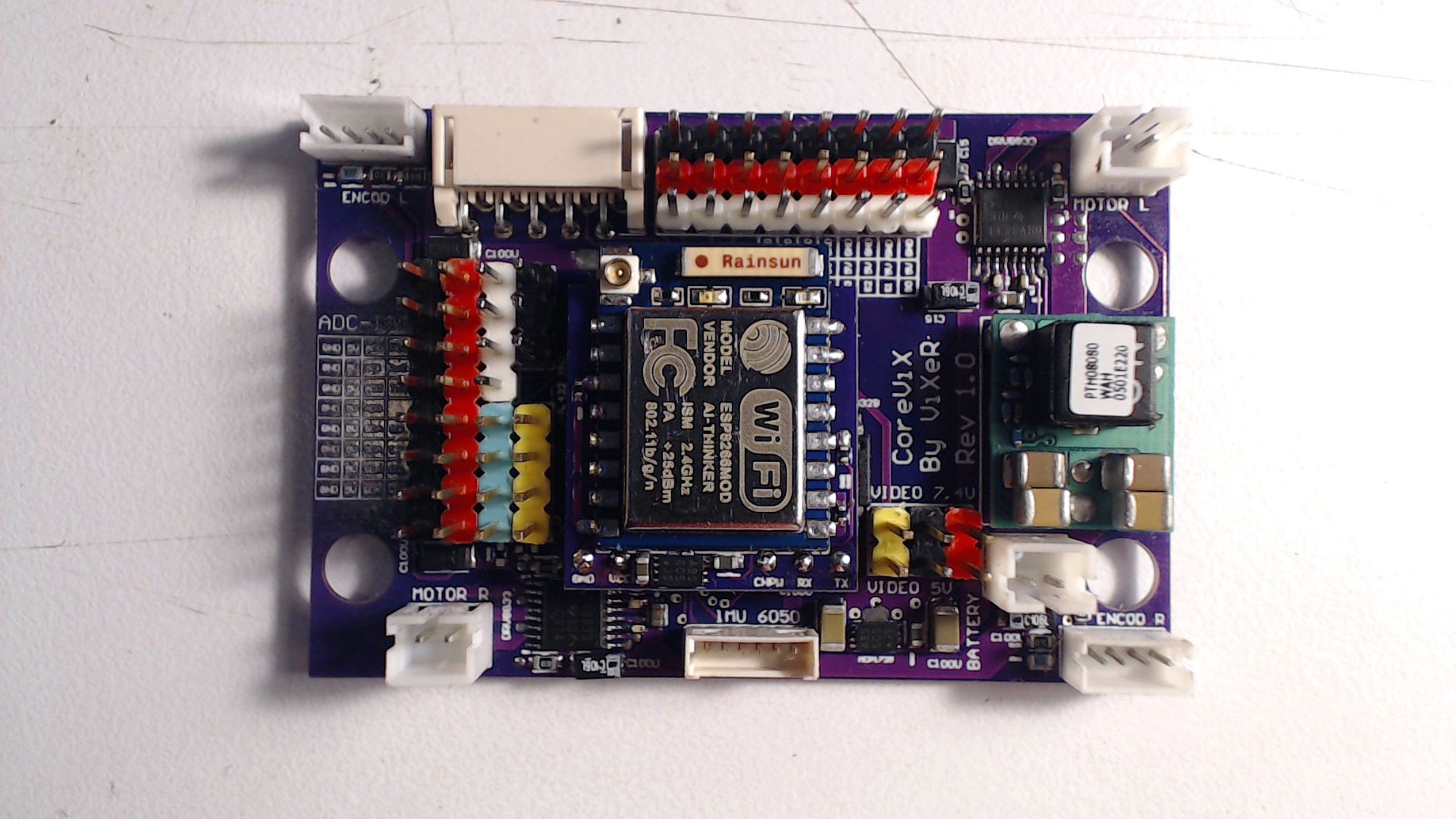
Now, with this new card, I could started the programming of the robot...





















 ssla-couk
ssla-couk
 Cirmall
Cirmall
 Victor Joo
Victor Joo
 Avi
Avi
Thanks for providing us this great knowledge, I love the green space so visit https://apkintl.com/papas-wingeria-to-go-apk-mod/