 SHAOS
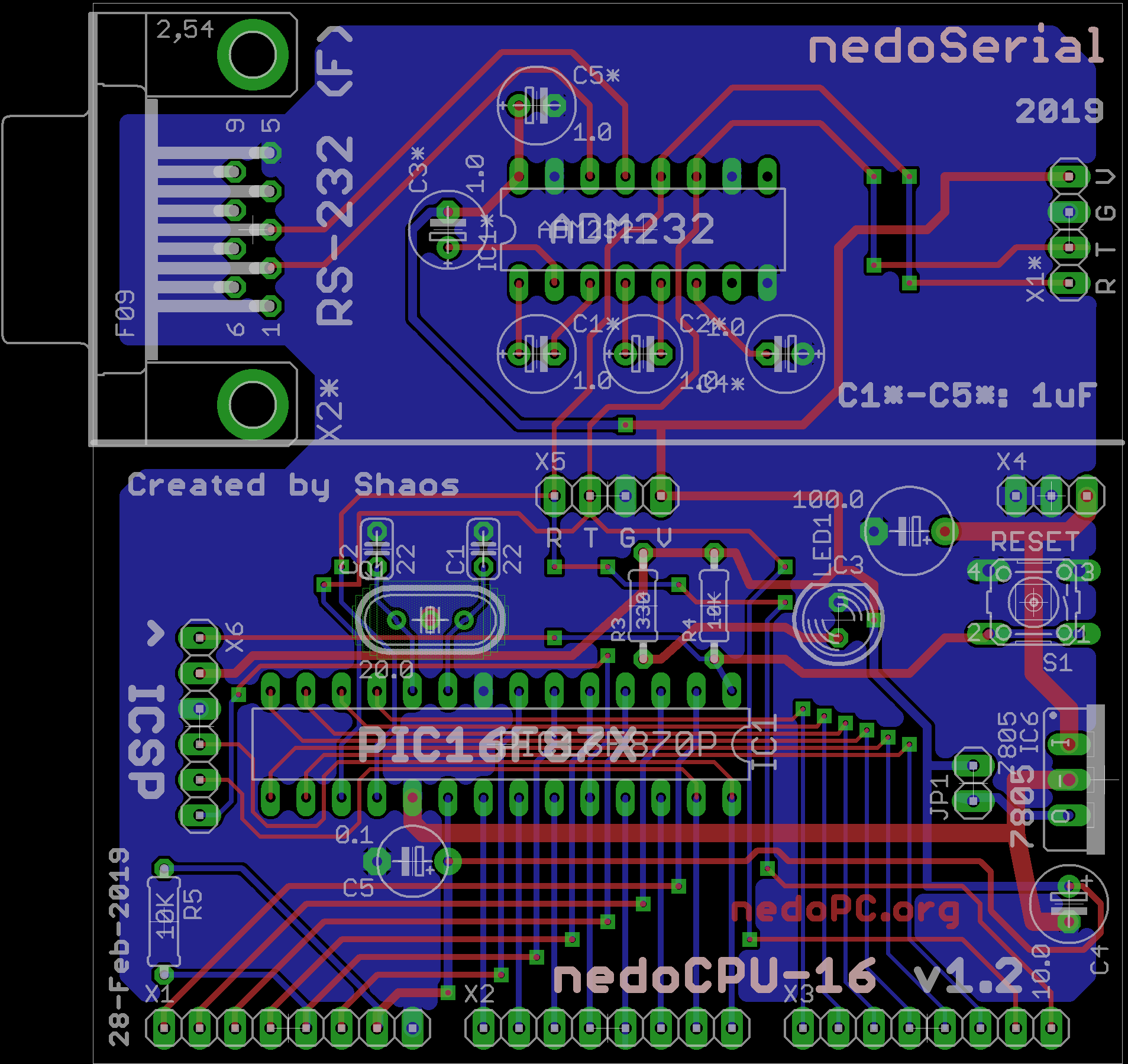
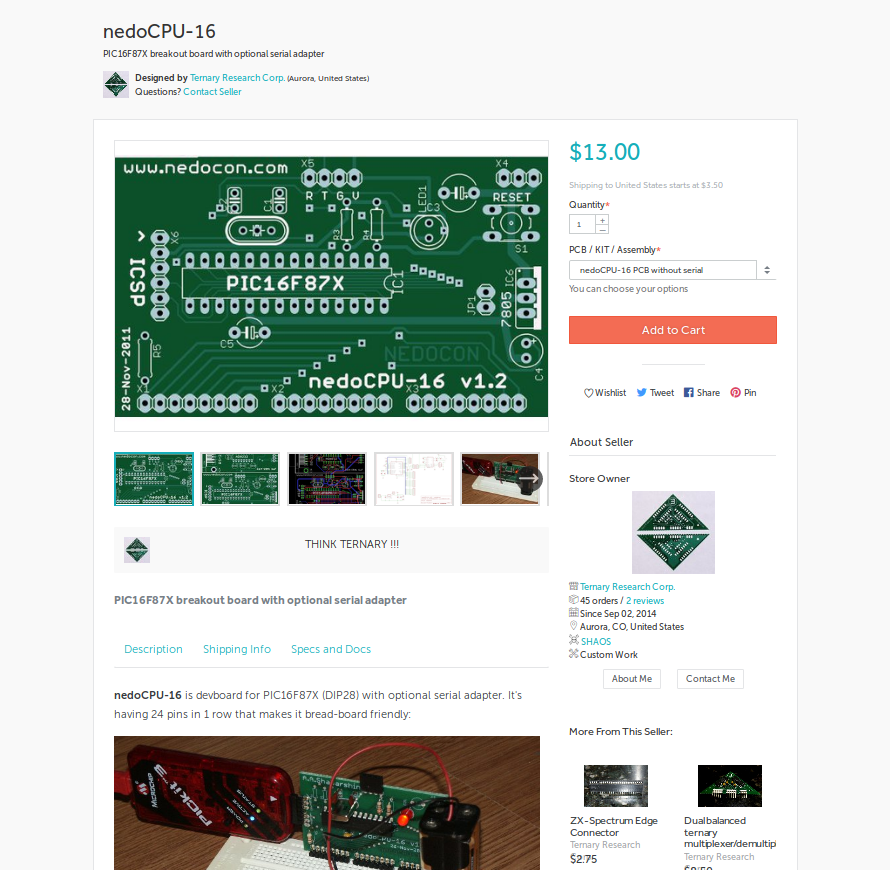
SHAOSBoard nedoCPU-16 is a processor board and serial adapter connected together - they could be separated if needed (board was designed in 2009-2011 and revised in March 2019):
nedoCPU-16 (older revision) was used in #3niti alpha simulator (integrated in 3niti alpha simu1 board) and also nedoCPU-16 was featured on Dangerous Prototypes blog on 11/29/2011:
http://dangerousprototypes.com/2011/11/29/nedocpu-16-pic16f87x-breakout-board/
For this board I wrote my own bootloader PDBLv1 (Public Domain Boot Loader v1) that allows to read and write program memory, data memory and EEPROM memory using serial interface (by any terminal program on PC). Also I wrote program that flashes HEX-file into PIC16F870 using PDBLv1 terminal commands for writing and verification. All source codes could be downloaded from FILES section of this project.
In this Hackaday project I will document extensions for this board to convert it into computer nedoPC-16 with keyboard, file storage, display etc.

 rogerdipaolo
rogerdipaolo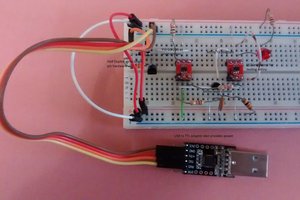

 kai
kai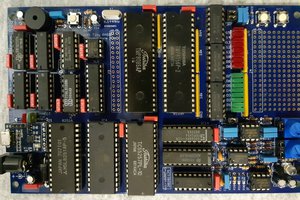
 Anders Hjelm
Anders Hjelm