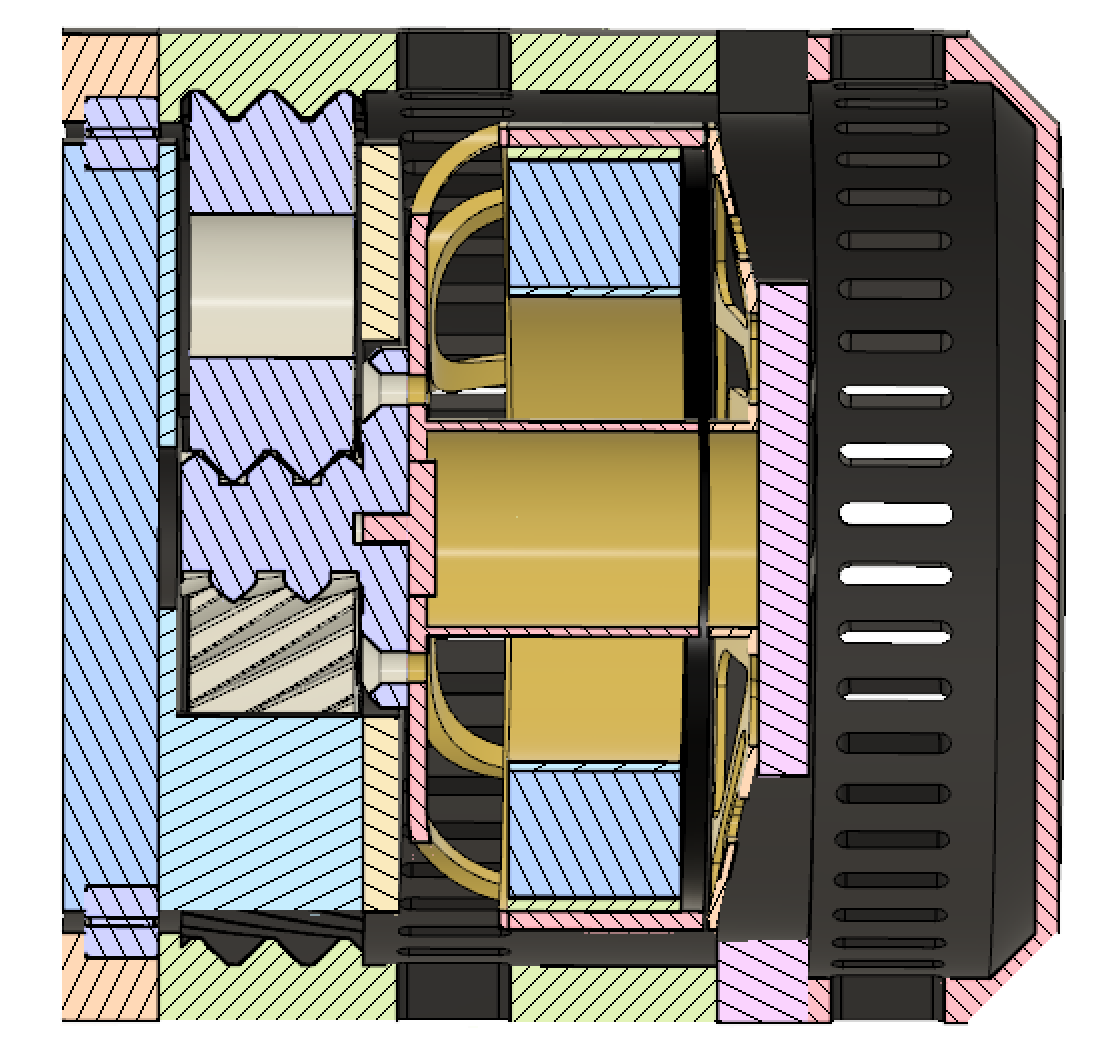
This is the new version of the OpenTorque actuator (still under development). I've made a number of design improvements:
- The two thin-section ball bearings are replaced by a single cross-roller bearing.
- Better cooling. The GPU fan is replaced by a powerful 100mm centrifugal blower.
- Higher gear ratio of 8:1, for higher peak torque and reduced I2R losses under normal loads.
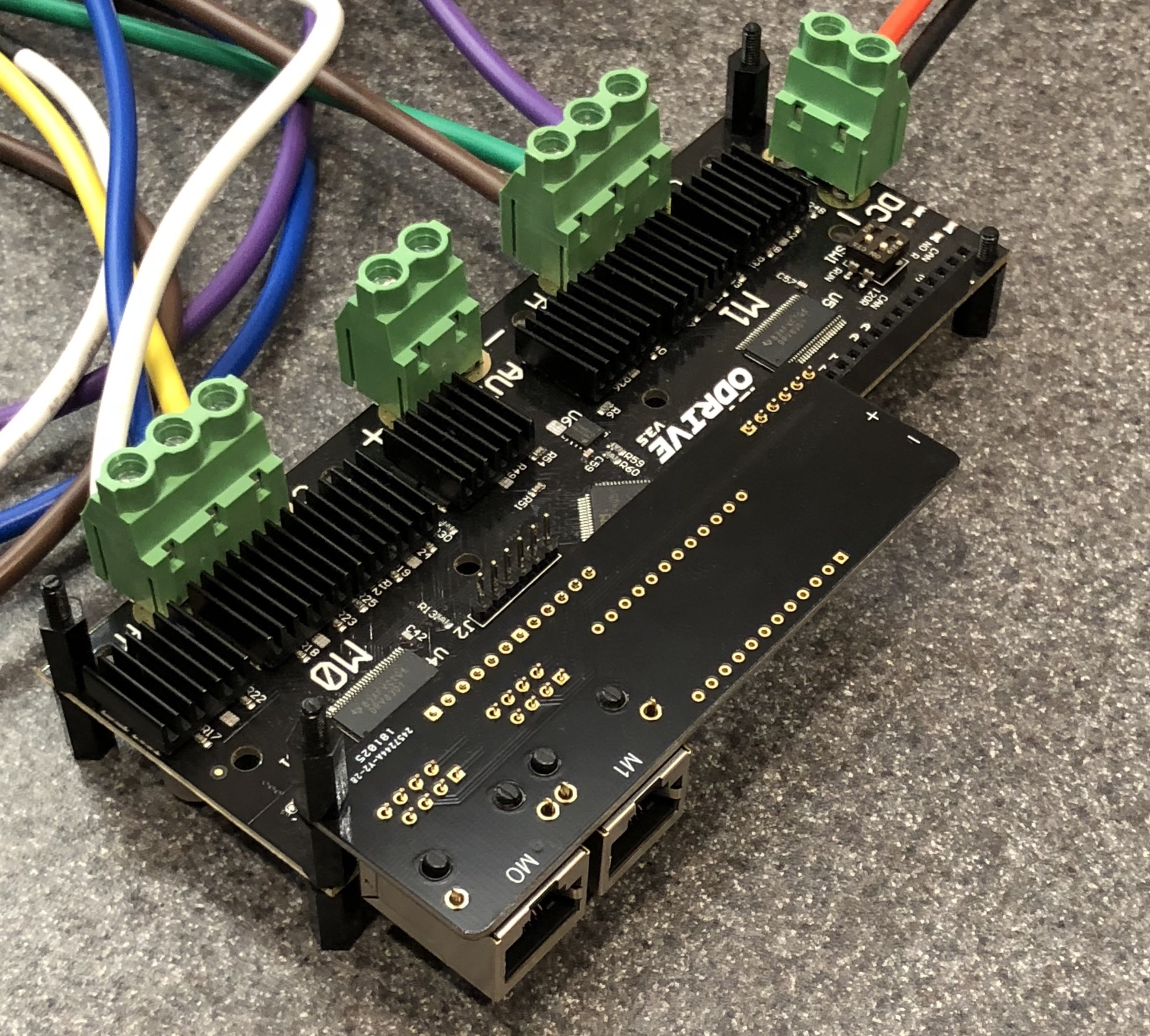
- Custom PCB that breaks out the encoder SPI lines along with thermistor output and fan power to an RJ45 connector. This connects via a CAT7 patch cable to a custom daughterboard on the ODrive, pictured below.
- Lighter and more compact than the V1 actuator, and a closed back (no more exposed fan).
- Direct-drive version, in addition to the quasi-direct-drive version.
These improvements are aimed at making it easier to build systems with large numbers of OpenTorque actuators. I'm using the new actuator for my Blackbird Bipedal Robot but it's also well-suited for quadrupeds, robot arms, exoskeletons, and so forth.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Nice work! Are you going to share the design?
Question: Why did you choose for the planetary gears? A Cycloide drive seems also suitable for 3D printing, gives low backlash and a easy adjustable gear ratio.
Are you sure? yes | no
Yeah, the design isn't completely finished yet but I'll share it once it is.
A cycloidal drive would have a higher gear ratio and therefore higher reflected inertia, so it wouldn't be suitable for quasi-direct-drive. According to Simon Kalouche's thesis (https://www.ri.cmu.edu/pub_files/2016/8/kaloucheThesis.pdf) the maximum ratio for a QDD actuator is 10:1.
Are you sure? yes | no