 Yannis
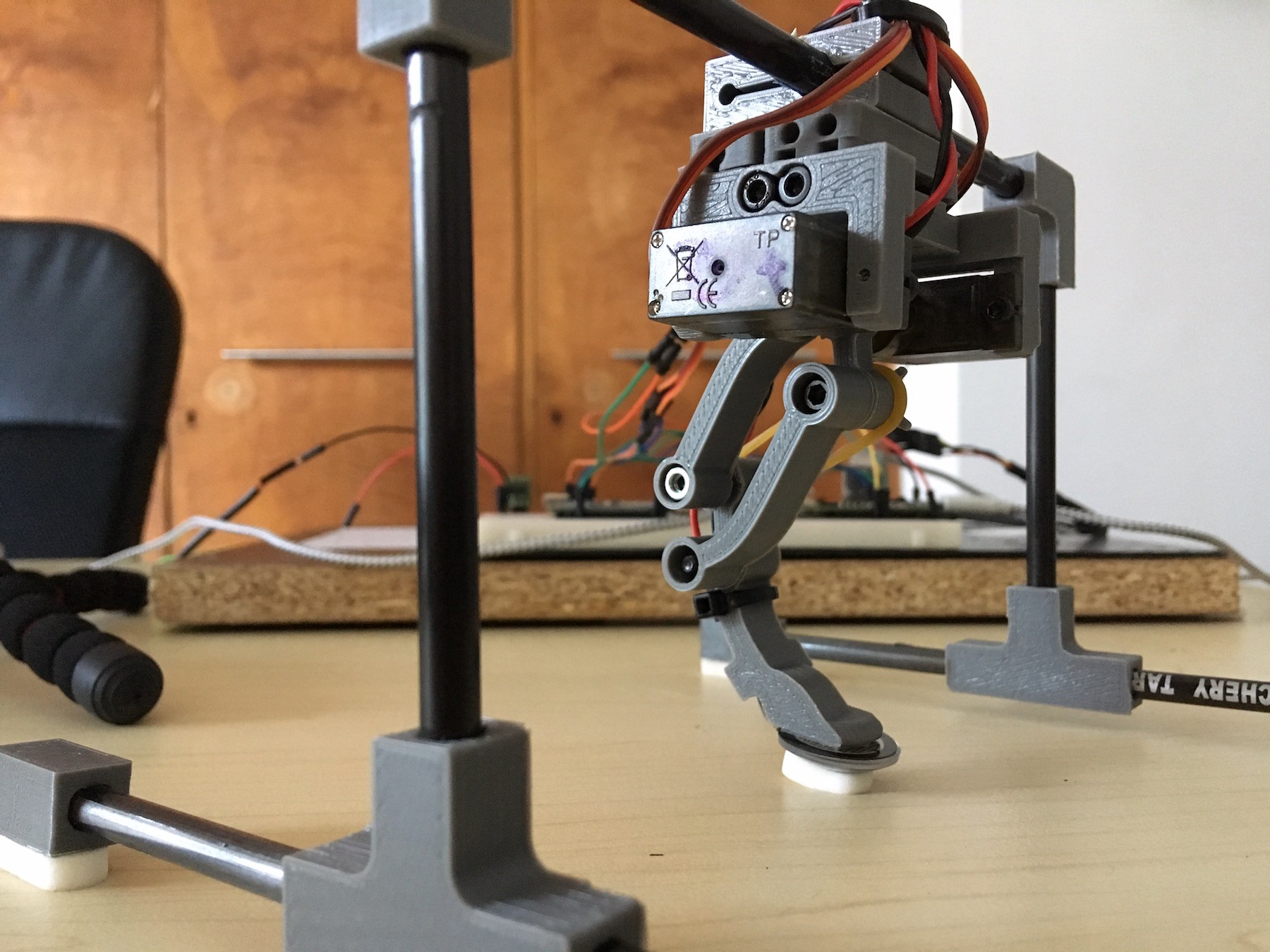
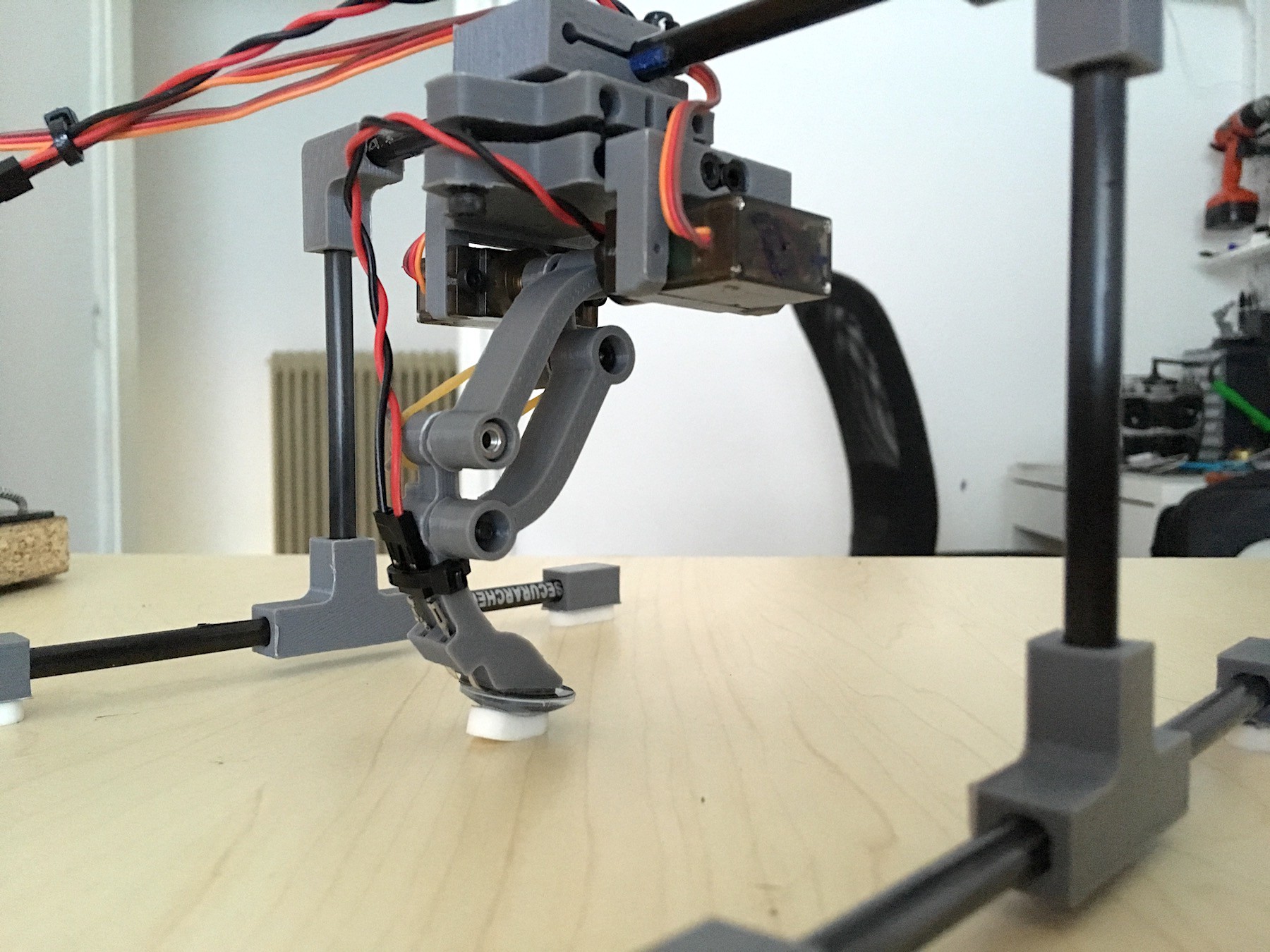
YannisI've redesigned the leg and implemented a force-sensing resistor (FSR) at the foot. This gives an immediate ground reaction feedback which should be faster than mounting the FSR at the leg root.
To test this leg prototype I've also built a self-standing rig made out of arrow parts and 3d printed corners. The rig is light enough that is easily lifted if the leg pushes against the ground. Therefore it is also a good setup to test whether the leg reaction to touching the ground is fast enough so as not to disturb the balance of the robot body (in a 4-leg configuration).
So far results are encouraging, as can be seen at the video below. The maximum reaction force recorded by the scale is around 50 grams. This is low enough that shouldn't be a disturbance to the quadruped stability. Even if it is, lowering the leg movement speed should be enough to improve reaction.
Next step is to write a routine to have the leg actually walk carrying the rig with it – sort of a "monopod" if you like.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Very Cool! Looking forward to seeing the monoped :)
Are you sure? yes | no