 MrDreamBot
MrDreamBotHere is a video showing MAX controlled by the webapp running on the Hicat Livera Camera Board:
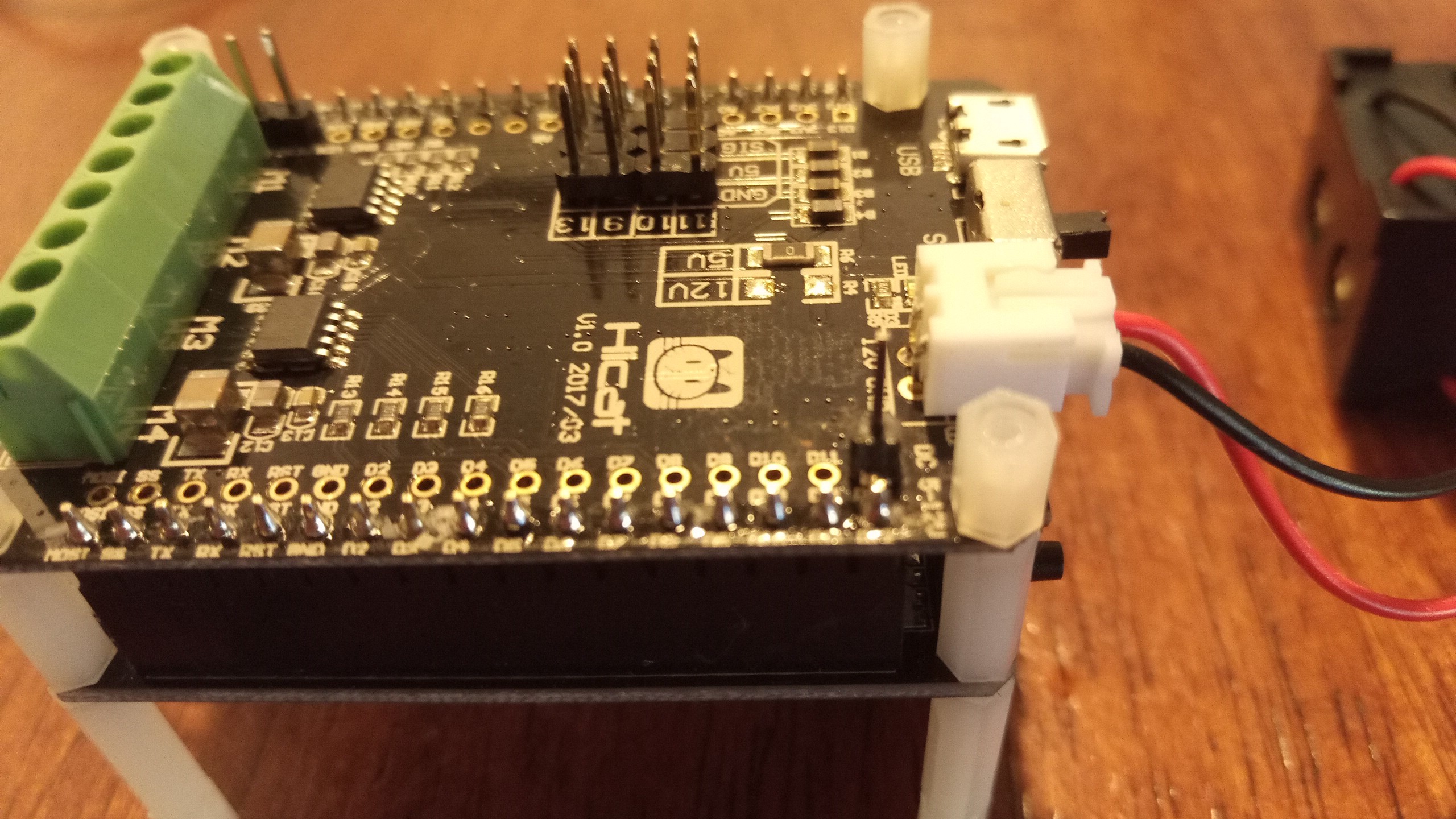
Yes, I finally got my second Hicat Livera board to replace the bricked one. I assembled the Livera with its motor driver board (used to provide 3A 5V power) and its pan-and-tilt unit (actually tile only) and used the assembly to replace MAX's controller (located in its mid-section). Before assembling them, I added 3 headers to the unused Arduino pins for controlling Meccano MAX's Locomotion, servo and Face. The pins are SCK, 12 and MISO respectively. See photo below.
I modified the Hicat's robot Arduino sketch to use my Arduino library for the Meccano MAX so that Hicat's webapp can be used to control the MAX using a browser. The GUI is shown below.
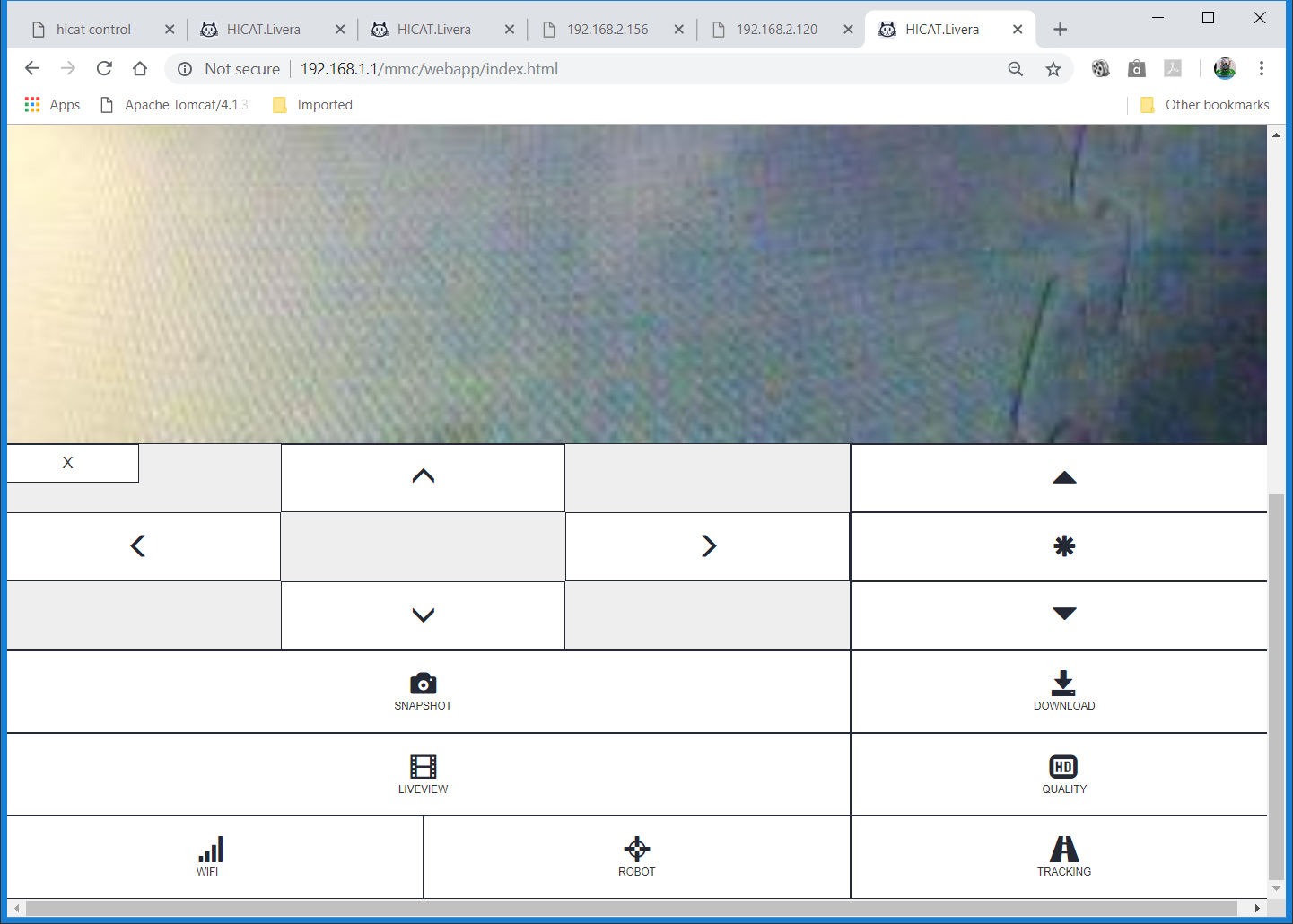
You can see that the live video is shown at the top while all the robot controls are below it.
The video posted shows the use of the Hicat webapp to control the MAX including switching on a laser mounted on the tilt unit, driving back and forth, turning, while displaying the image captured on the camera. Unfortunately, the window showing the video is too big to see the whole live screen without scrolling up and down.
The webapp is running on the embedded Linux of the Hicat Livera Camera board. It communicates with the onboard Arduino Leonardo compatible using Arduino's UART (Serial). Clicking the control widgets of the webapp sends a command to the Arduino which carries out the operations.
The Arduino sketch "MaxLivera.ino" can be found in the repository on this page.
The next step is to make MAX into a vision-based robot meaning that it reacts to the environment by observing the change in scenery via the image fed by the camera.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.