QLBRD is a project aimed at solving certain issues I observed while using different models of remote controllers. Instead of listing what is wrong with them, it's more reasonable to say how my solution helps people interact with their devices.
MATERIAL FEEDBACK
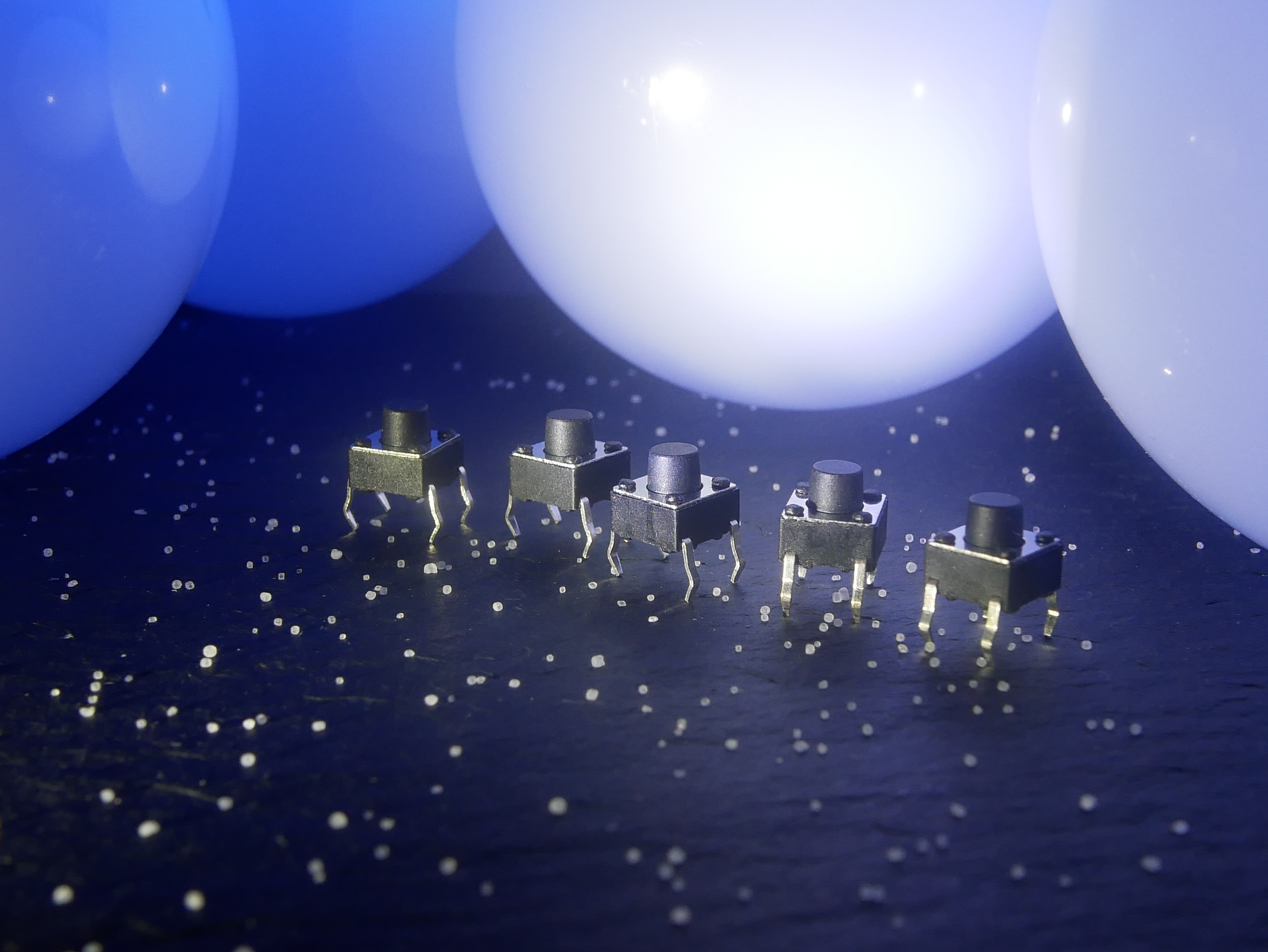
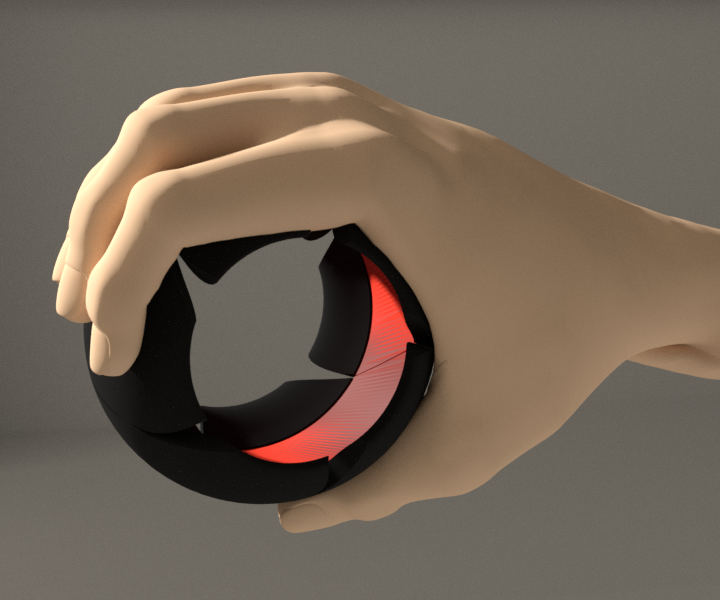
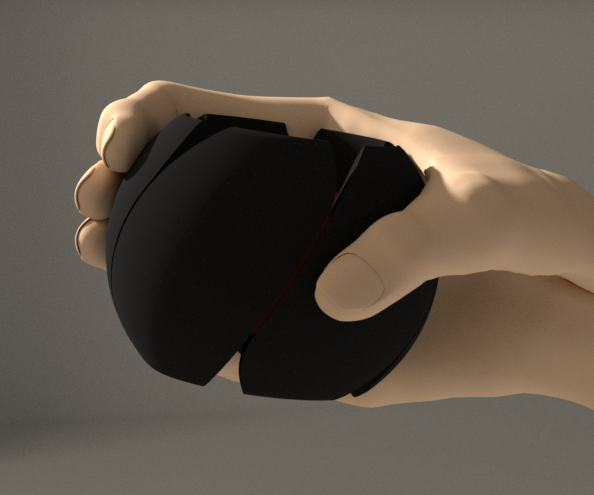
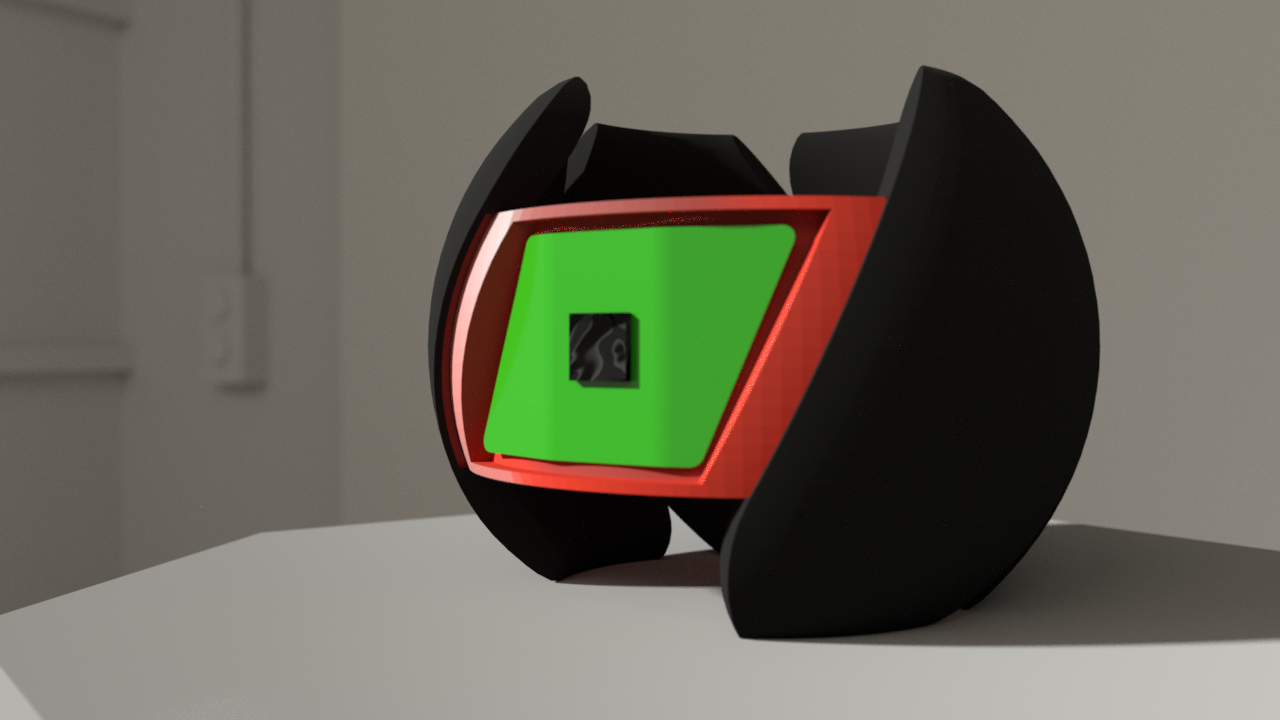
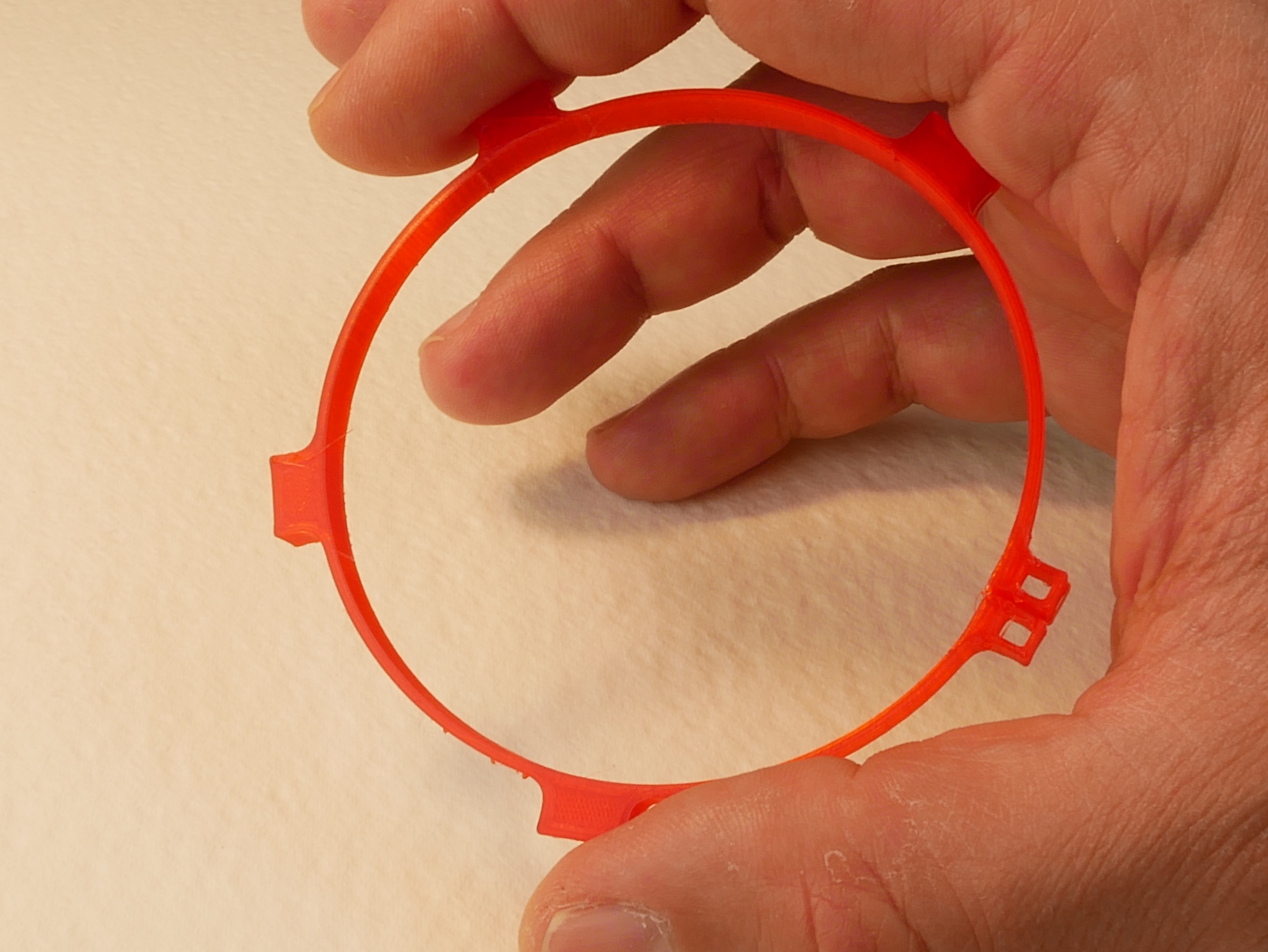
QLBRD shape fits into human palm. It fills it. User can feel something under fingers, feels response of keys when they surrender to pressure. At the same time most of hand can remain relaxed without need to keep it in the air.
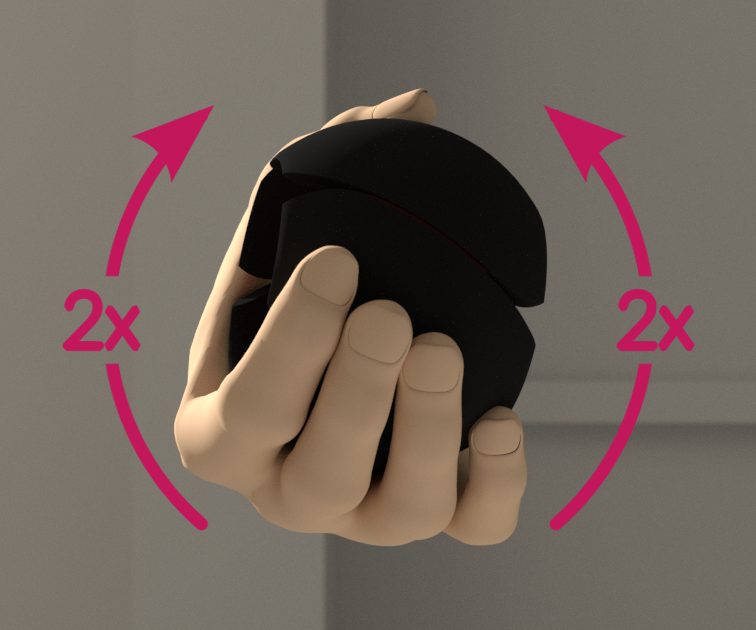
DIFFERENT POSITIONS
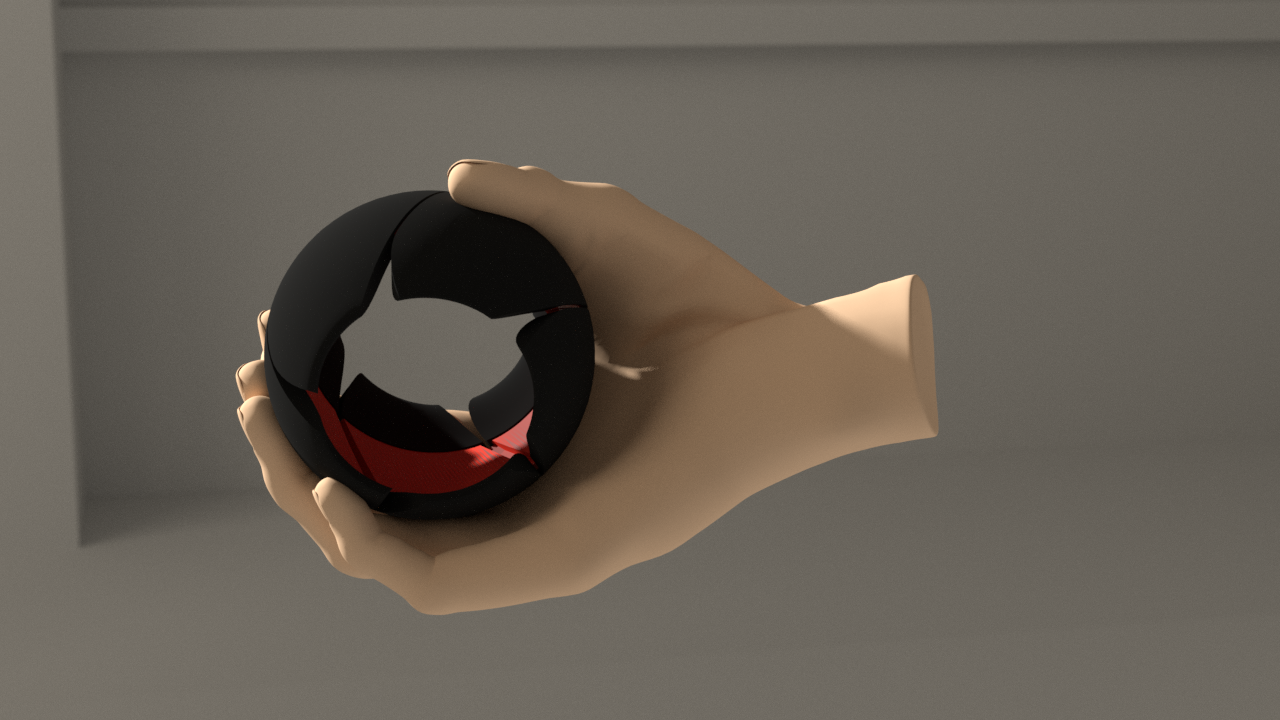
QLBRD can work in any position, user just holds it like a tennis ball and works by pressing keys and changes modes of operation by changing ball orientation in space. User can use it not only as a keyboard but also as a mouse like pointing device, 3d manipulator, game controller.
VERSATILITY
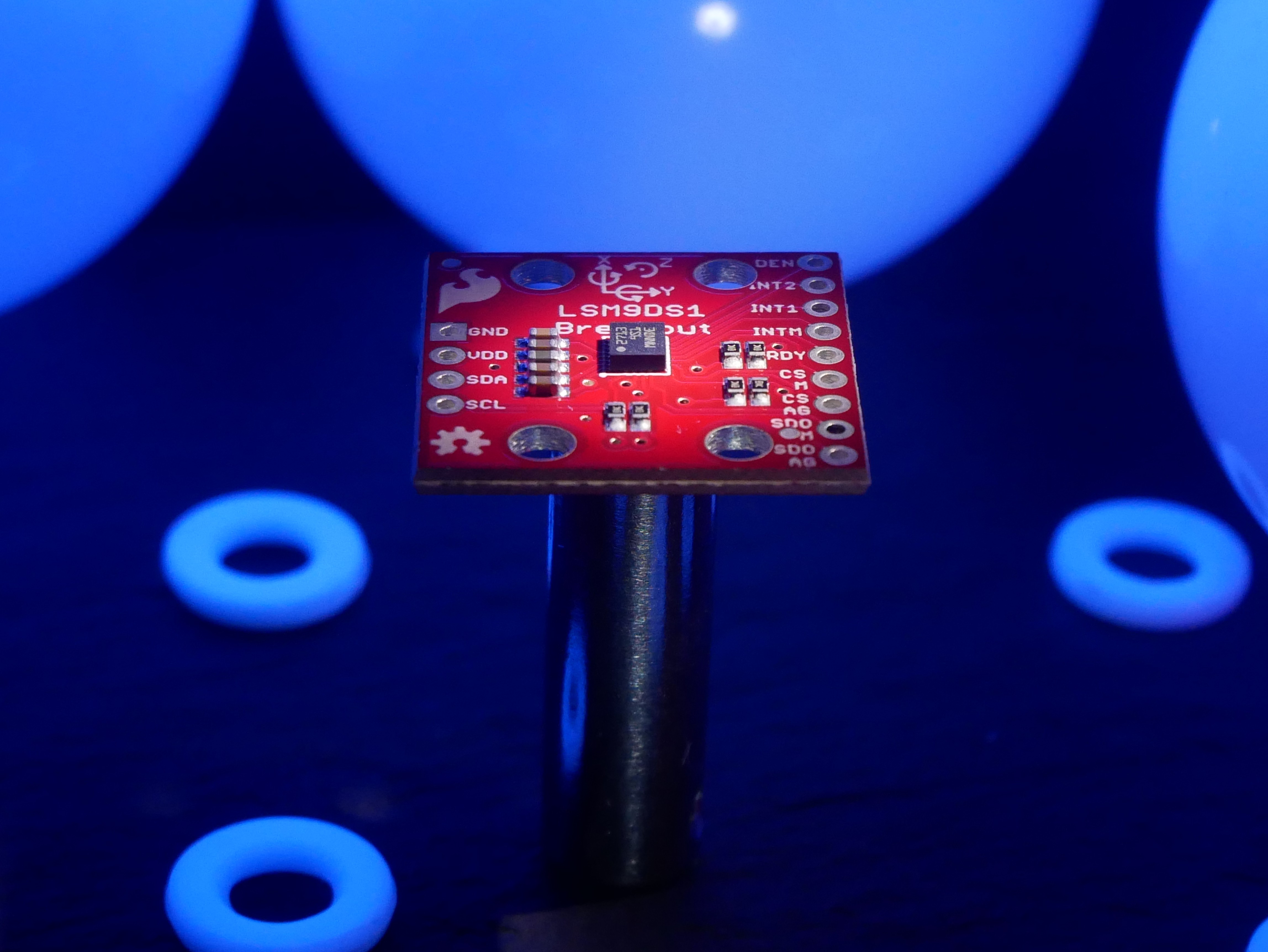
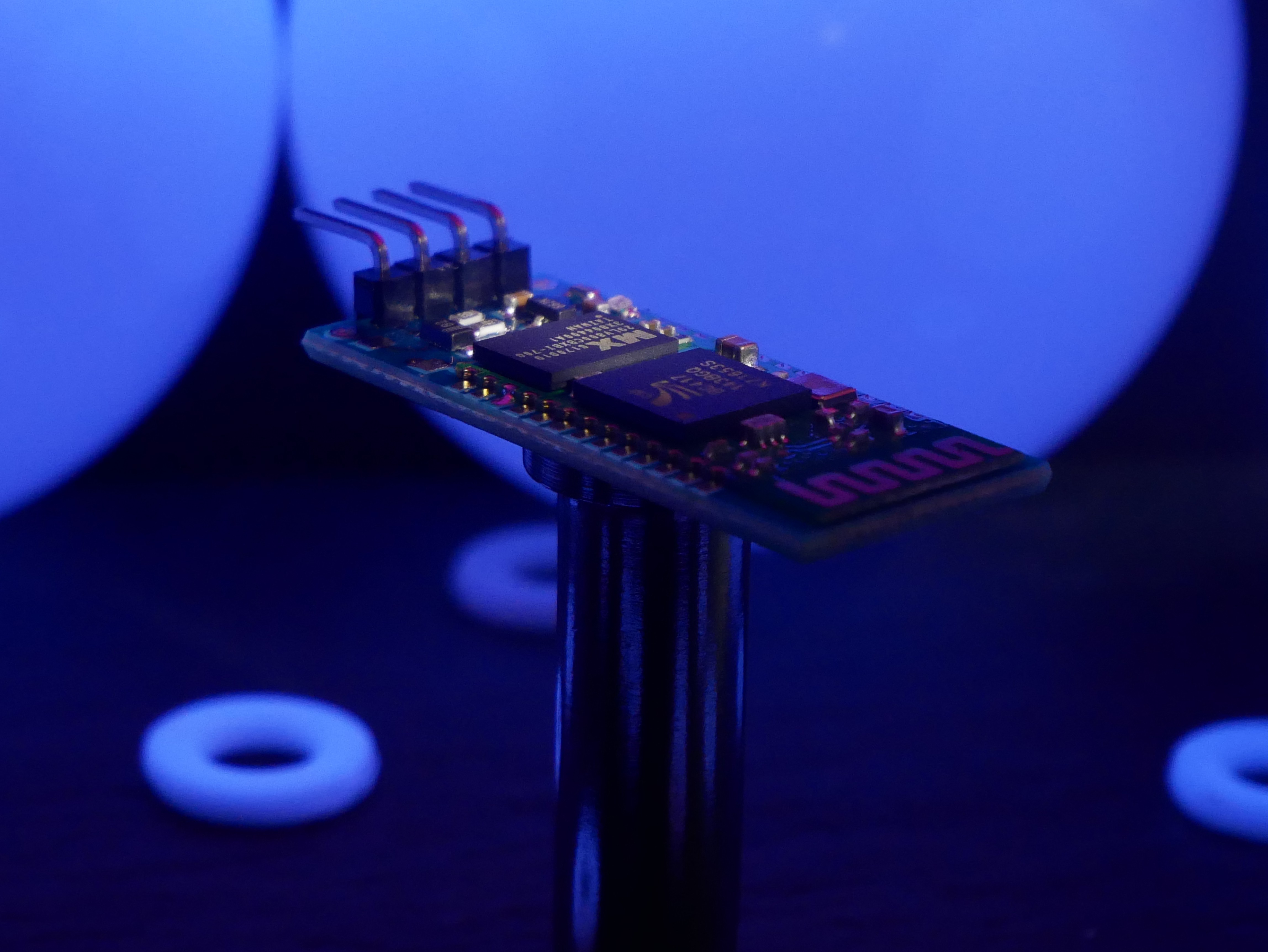
Thanks to Bluetooth interface QLBRD can interact with any device it can connect. There is a possibility to use different keyboard and controller profiles.
HEALTH
QLBRD can prevent carpal tunnel syndrome and similar conditions. CTS affects people working with computers whose work requires constant repetition of the same movements especially with excessive flexion and straightening of wrists.
Using QLBRD can bring relief in suffering from such conditions as it forces movement and training of wrists while it does not require constant strain in muscles.
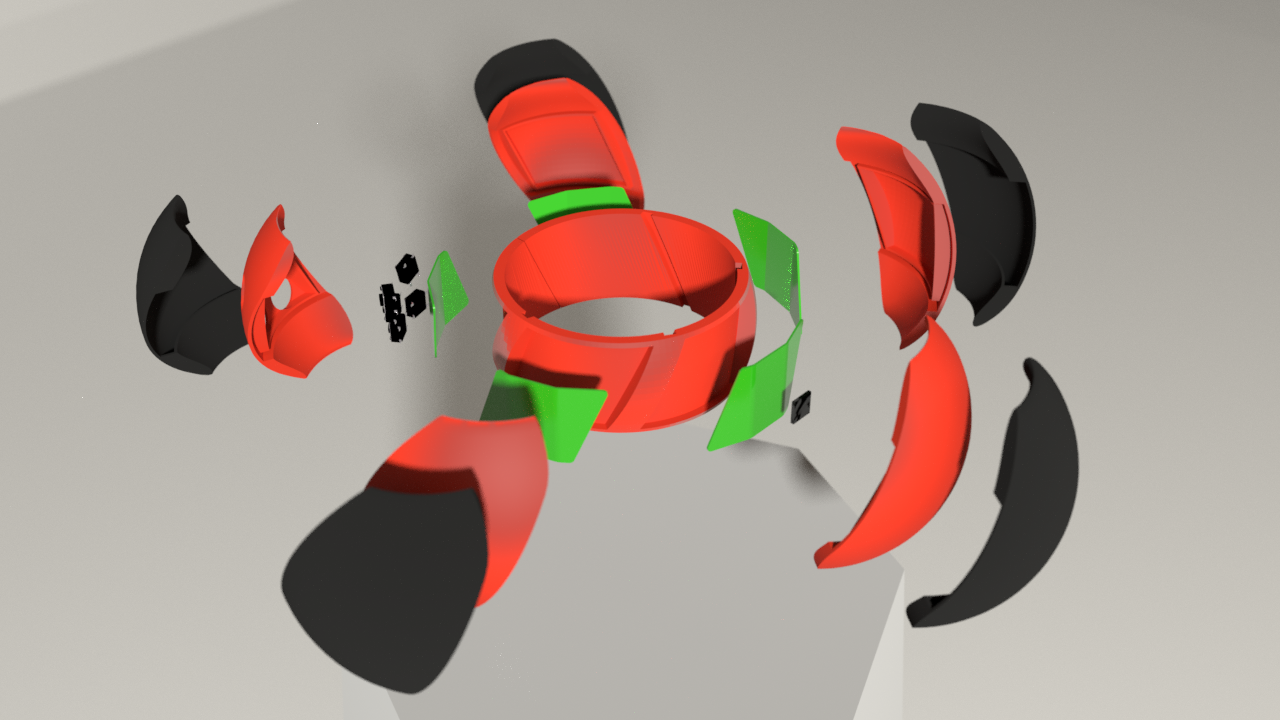
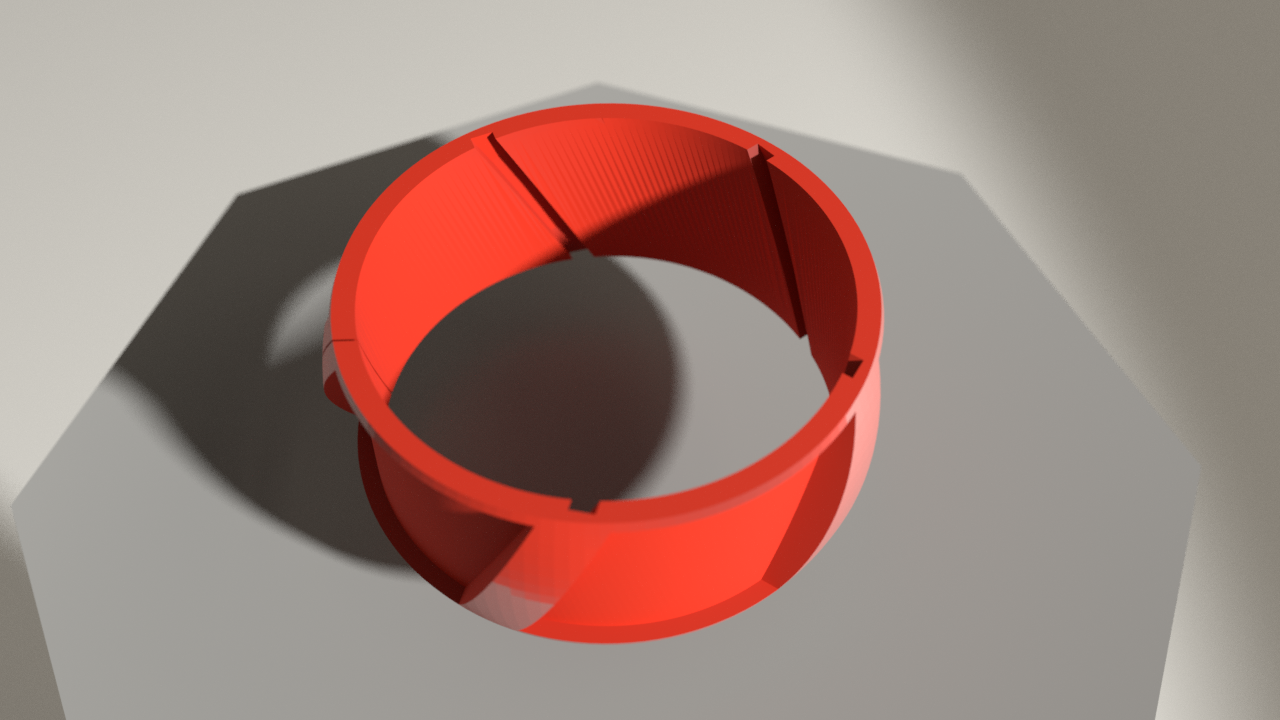
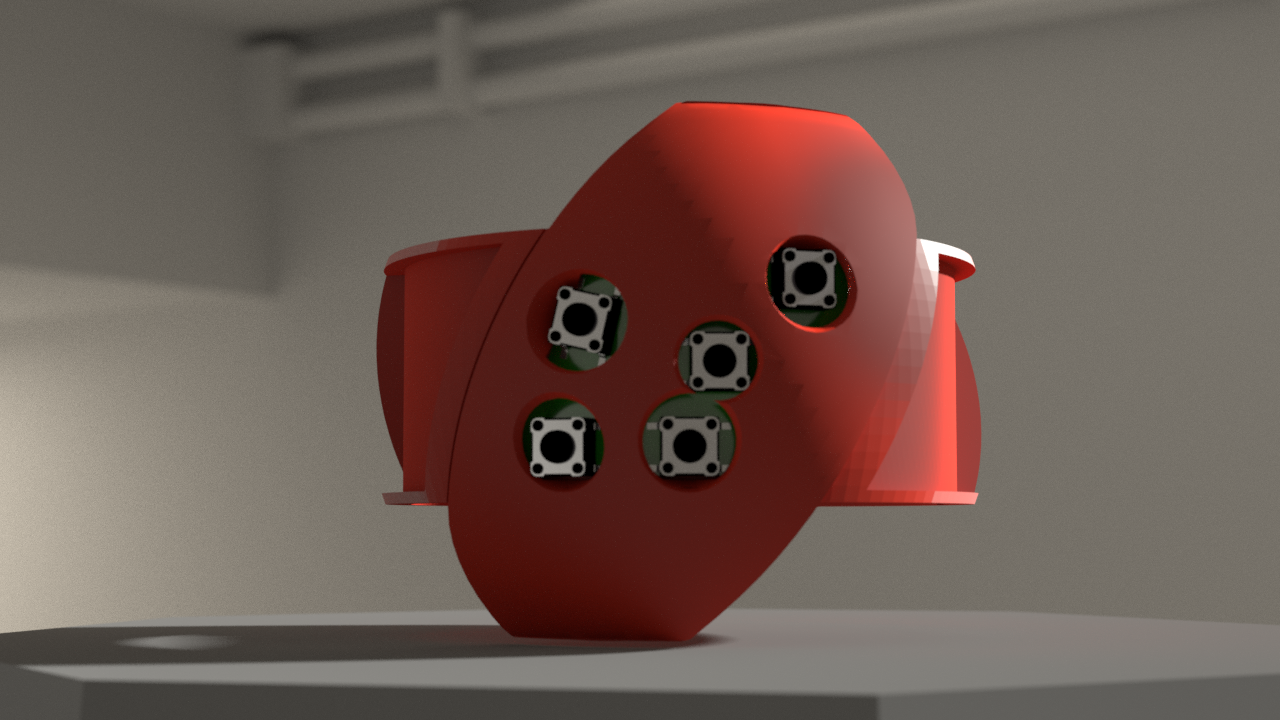
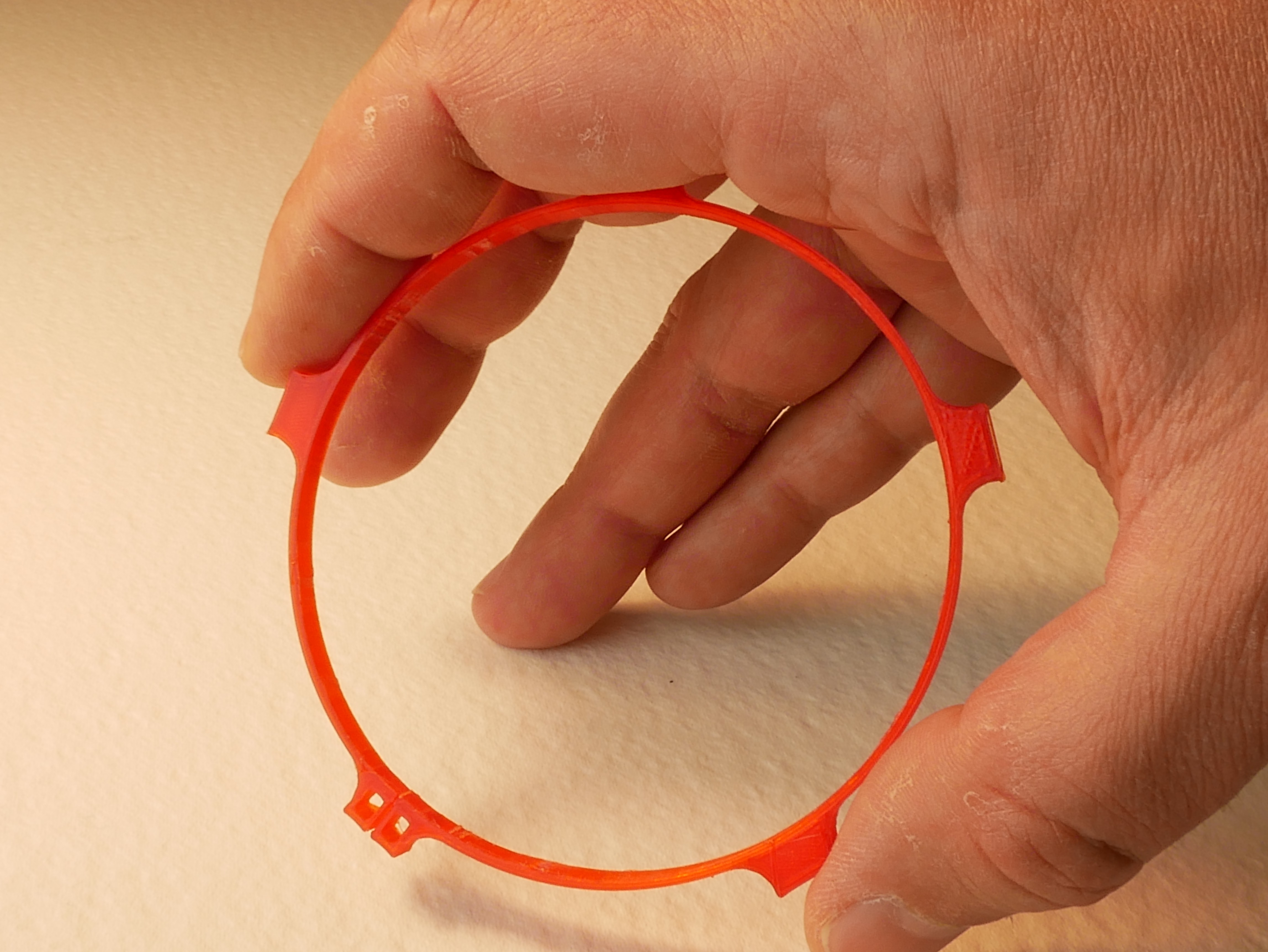
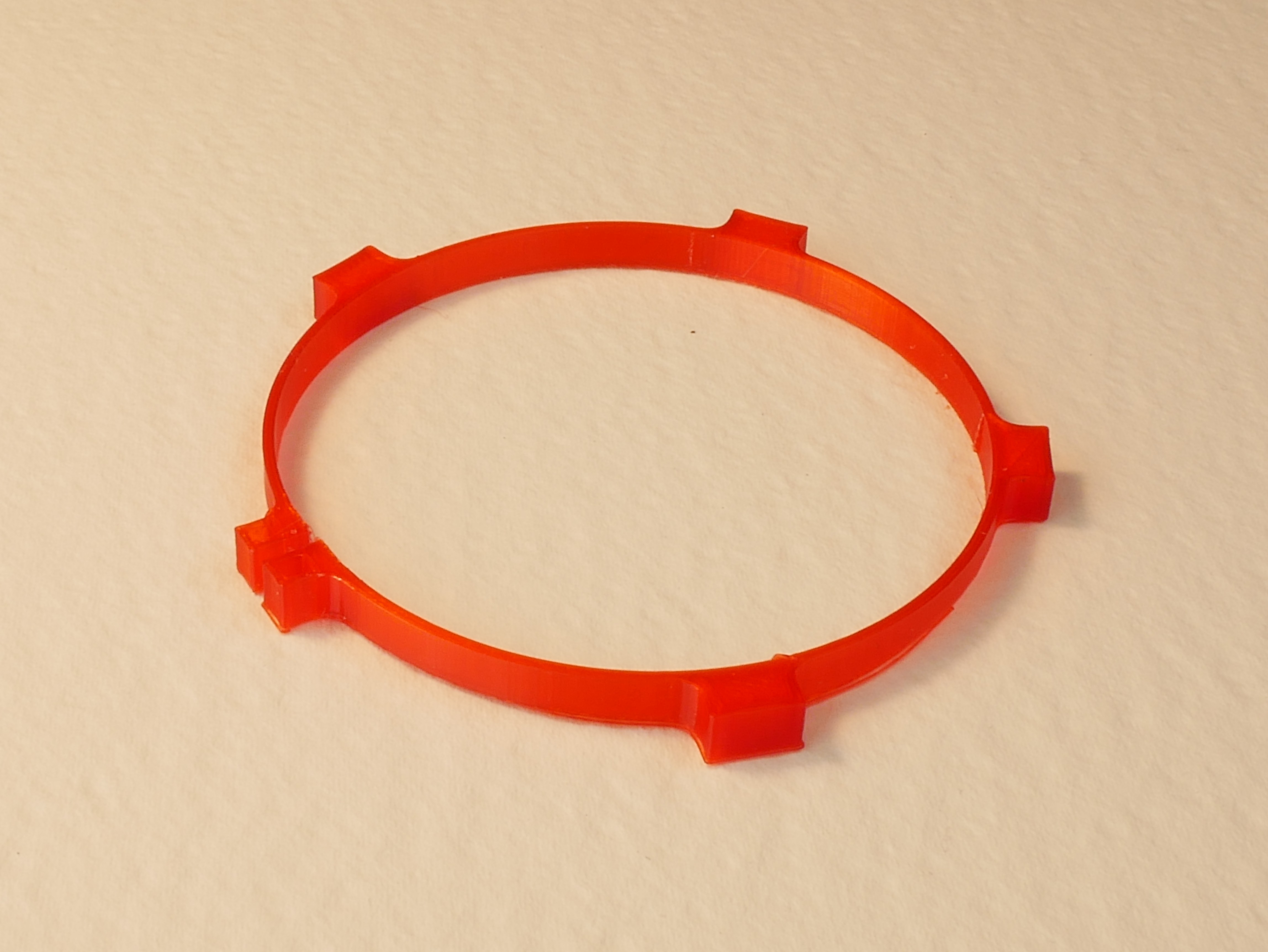
MODULARITY
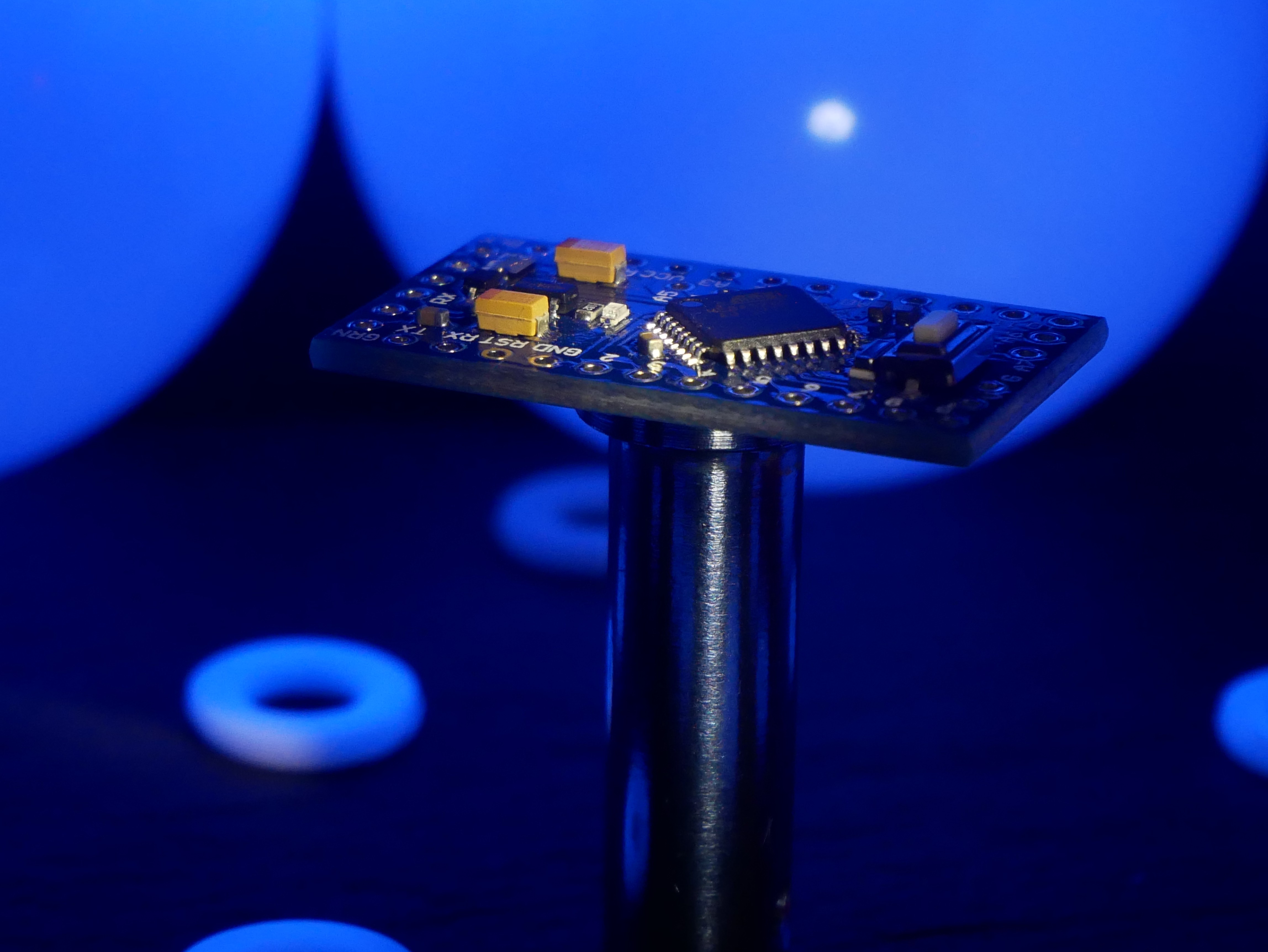
QLBRD is meant to be composed of different modules sharing common data bus and power line. Modules are attached to main ring and are swappable. This enables for easy extension and adaptation to different tasks.
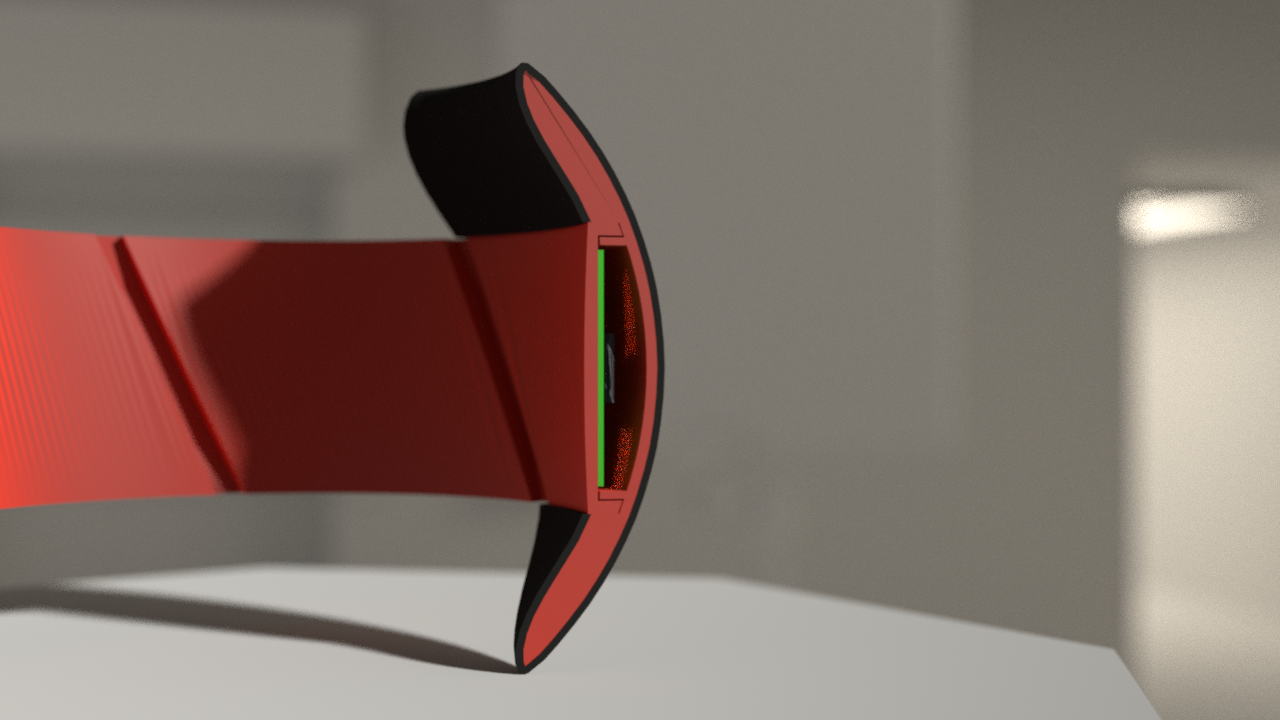
PORTABILITY
QLBRD can be worn on hand like a smart bracelet. More, in such position and with added modules it may be used as a smartwatch (with addition of eink module and possibly a gsm one as well).
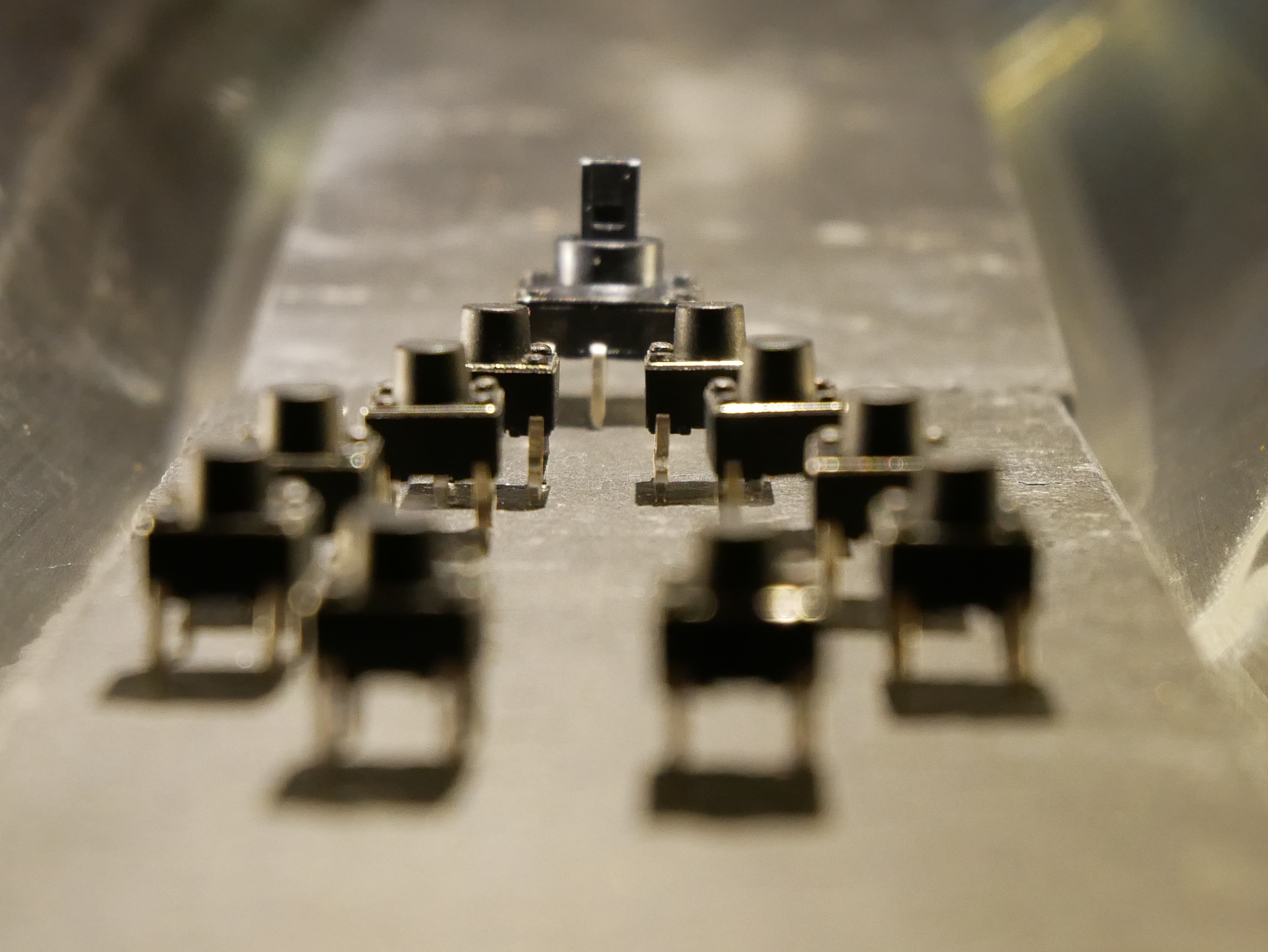
SIMPLICITY
My aim is to have a device that can be assembled using off-the-shelf components and some skill. 3d printer can be of help when it comes to plastic parts, but I provide all project files that can be ordered with external service providers as well.
It's worth mentioning that I do not deal with such maker activities on a regular basis and thus have limited lab equipment. If I am able to make it, everyone can.






 CriptasticHacker
CriptasticHacker
 Supplyframe DesignLab
Supplyframe DesignLab
 Maximiliano Rojas
Maximiliano Rojas