This wheel allows you to capture two orthogonal views with a single camera, facilitating 3D reconstruction of body kinematics using DeepLabCut software. This wheel is also lightweight, allowing mice to run quickly and happily. I recommend using Bonsai software for image acquisition. We also have had success with FLIR cameras for high speed tracking.
The version of the wheel described below is made primarily of acrylic and polycarbonate. However, if you have a need for speed we use a modified version of this wheel that is sturdier and more lightweight. This is accomplished by using a thin aluminum spokes panel, and by cutting slits directly into the polycarbonate for traction and weight reduction. Both of these modifications require water jet manufacturing, and therefore increase the cost to several hundreds of dollars. Please reach out if you would like to know how to build this fancier version of the wheel.
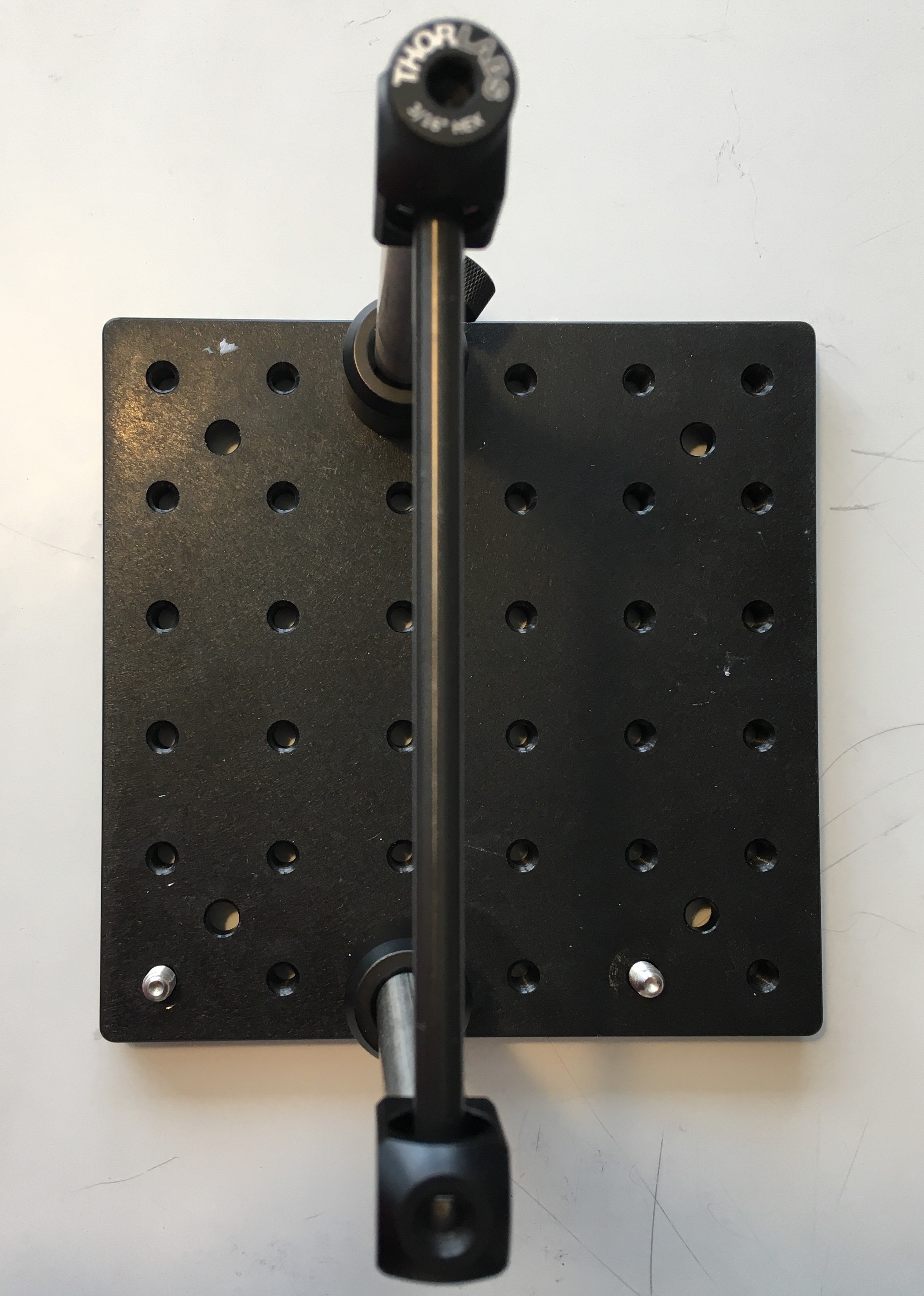
If you would like to measure movement of the wheel, I recommend using a rotary encoder mounted on an additional post mounted in parallel with the other two. If you need advice on how to do this please reach out.
Please send pictures of your completed wheel so we can post them here!



 PengxiangXu
PengxiangXu

 Zachary Marlow
Zachary Marlow
 ReVision
ReVision