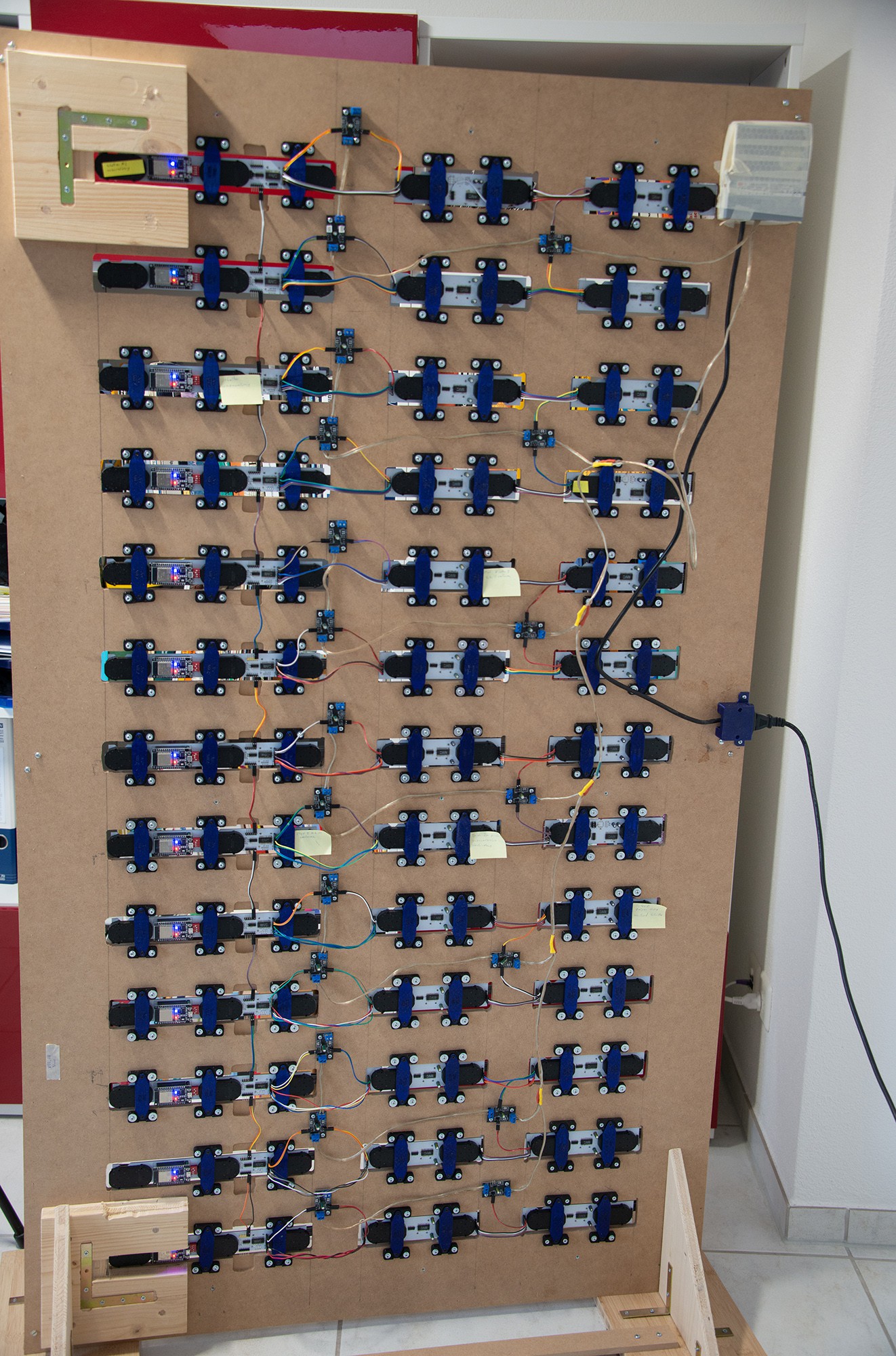
After quite some while, I can present some progress.
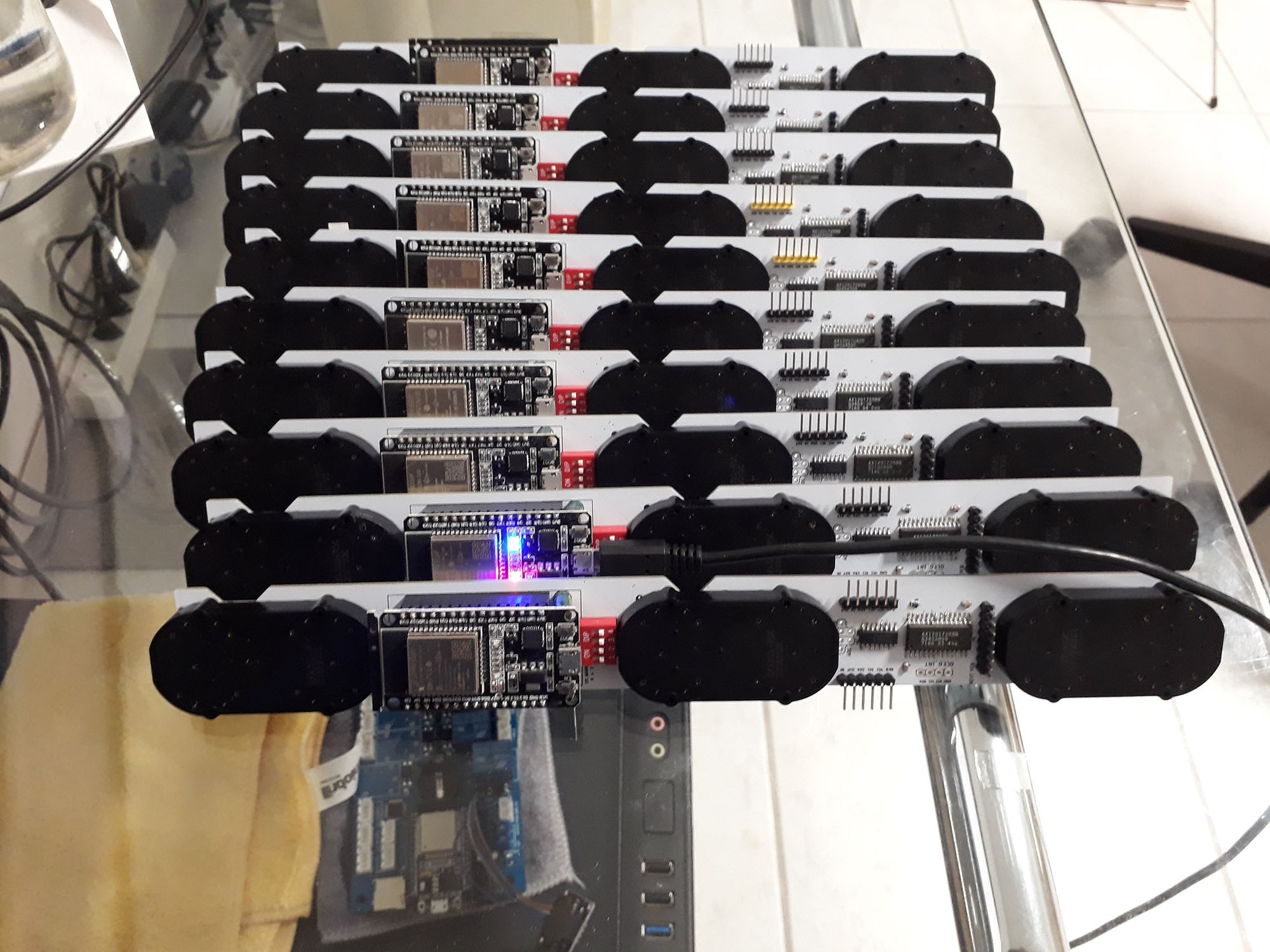
All 182 handles are working fine. I controll them over 13 ESP32 MCU. Between the "master" and the "slaves" (I know, this does not exist with ESP-NOW) I communicate with ESP-NOW. In future, an ANDROID app will controll the master.
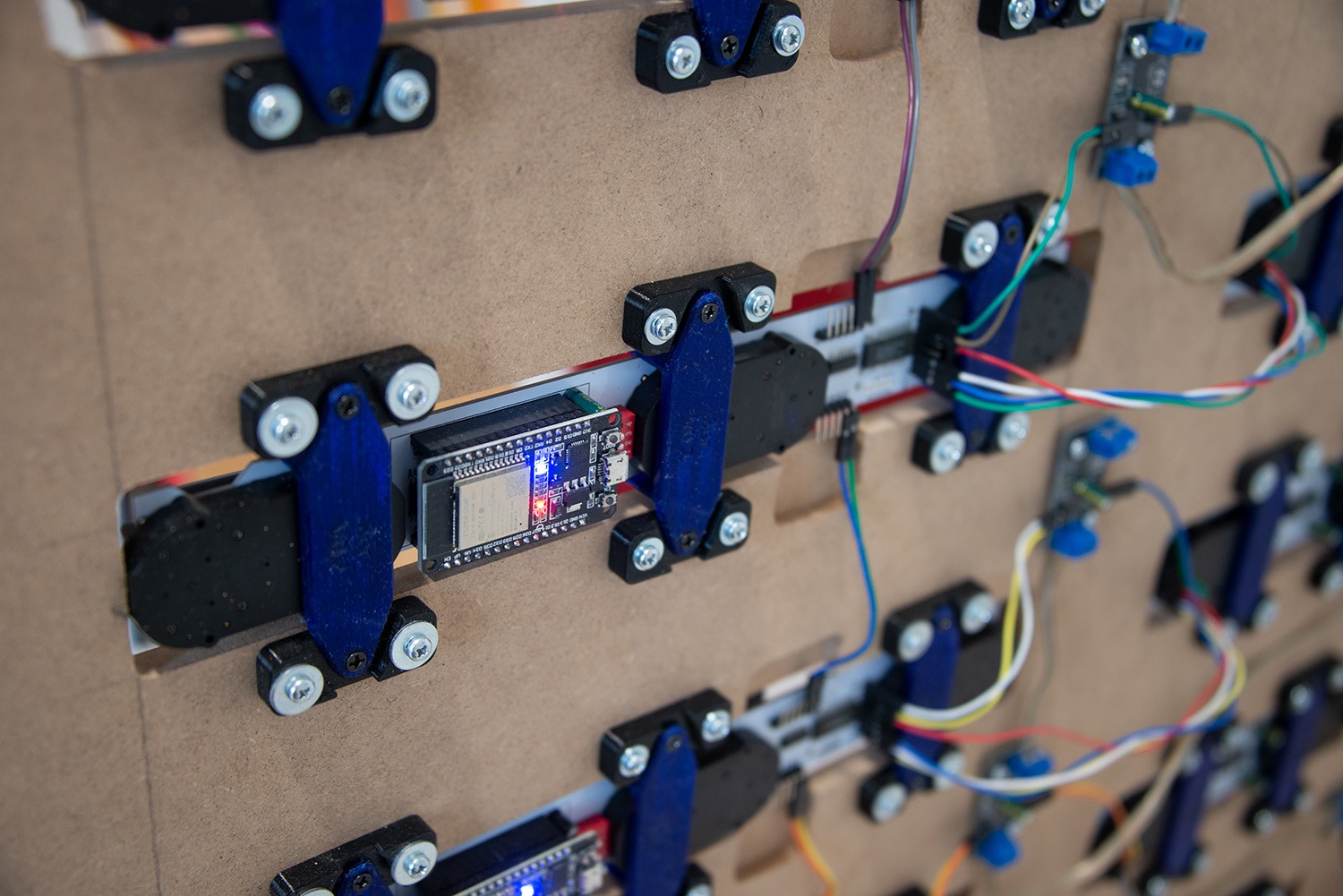
The communication between the slave ESP32 and the stepper drivers, is via I2C and - don't follow this!! - Dupont wires.
I learned the hard way, what seems to be obvious to all experienced makers...
Dupont = prototyping
Dupont = NOT for large scale and/or permanent installations!
They are simply not reliable. So I need to change to JST-XH... All of them... outch :-(
The PCBs with the motors are hold by a bracket which is screwed to a support on the wooden frame. With this, I can exchange easily individual PCBs later. Also they are interchangeable. I think, this almost 100h of 3D printing was worth the effort.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hello have you made any progress lately?
Are you sure? yes | no
@T Smith , sorry, I just now saw your comments. I have no new progress compared to what you see, except that I unbuild all of it. But "only" to change all connectors to JST to make the connections more reliable. I have also made custom JST cables. Once all will be reworked, I will again install it.
Another change I will do, is that I use new power line distribution to make it more reliable and easier to mount. Unfortunately I make much less progress than I wished. I hoped to have it finished until End of June, but this will be an illusion :-(
Are you sure? yes | no
Thanks for the update. I want to copy your work for a project in my house. Do you have any spare boards I could purchase before I commit to ordering them?
Are you sure? yes | no
@T Smith , I have only 3 unpopulated PCB left. So you need to order new from a PCB manufacturer anyhow and populate them. I also don't have stepper drivers left over. So you need to order all from start anyhow.
If you did not build a prototype before, I highly recomend you to do so. The motors are not expensive (~7US$/stepper), but you need a lot of them. In total, my wall you see, cost me over 1'000US$ without counting all the spares, failures, prototypes... Just to copy 1:1 the existing wall.
Then there is another "issue". Humans Since 1982 have some design rights on this work. I have signed a confidentiality agreement with them, which does not allow me to share certain details. They cannot forbide you to build this on your own for yourselfe, but a) it's forbiden to sell parts or the whole work and b) at the end it's nothing but fair that they have "invented" this design and so they should also be able to sell it now. I saw they workshop and the huge effort they put into a reliable hardware and software is enormous! More than I expected. Therefore the high prices they ask for are absolutely fair prices.
Are you sure? yes | no
Also great work :) Do you have real-time work yet?
Are you sure? yes | no
Hello. Just found this project and wanted to do this for a long time. The first step for me is getting the boards made. Is the 07 version the one you are using in the latest video? Can you share where you got these made?
Are you sure? yes | no