 RobsonCouto
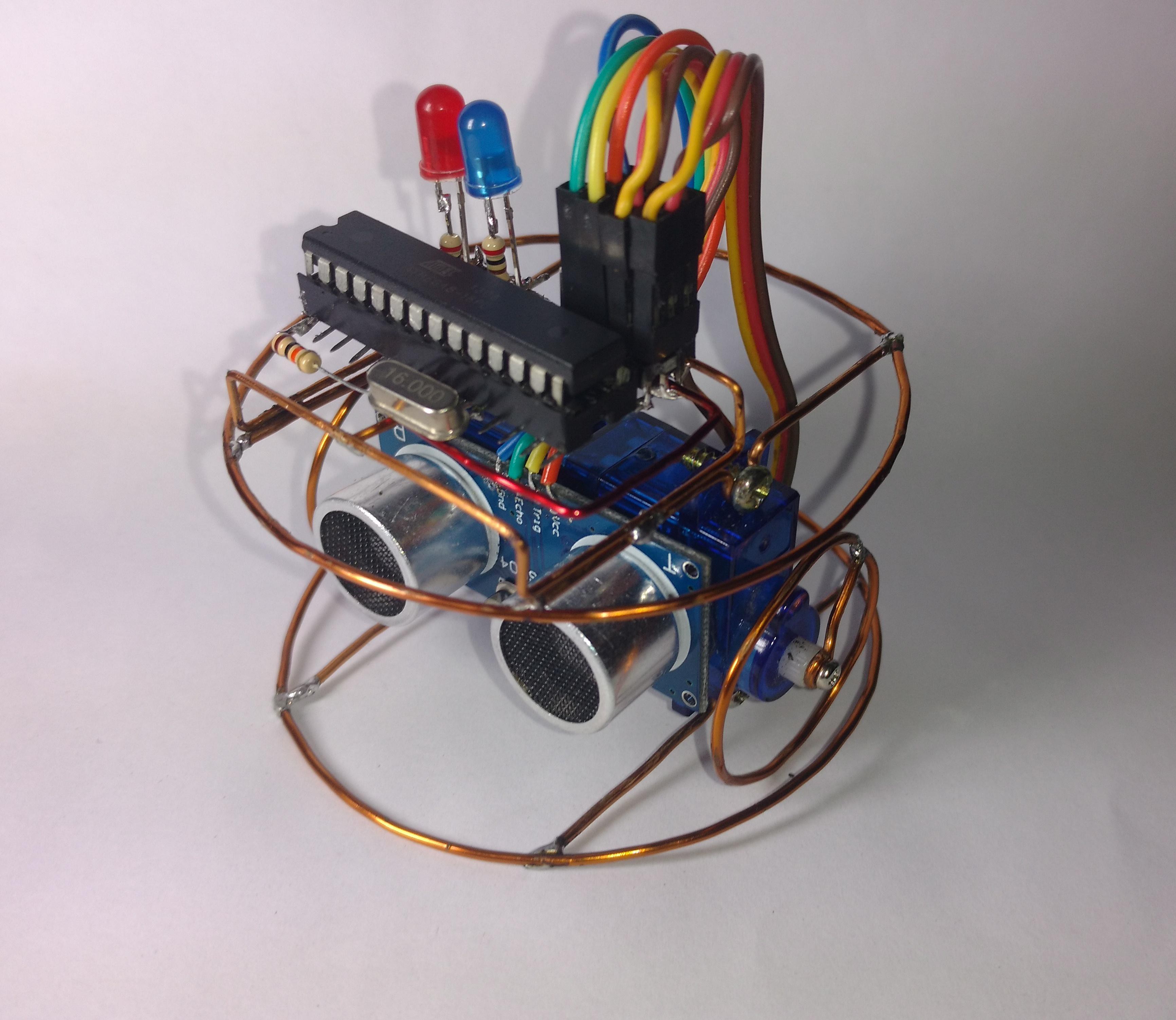
RobsonCoutoI have tested the circuit components with the robot hooked to external 5V, the servos were working fine as intended. As they are hacked for continuous rotation, setting them to 0 degrees makes them spin in one direction, while 180 degrees makes them spin on the opposite direction.
The ultrasonic sensor I added on the last log was not working, but thankfully I had a spare one, which was new and still in the package, so no problem. I was afraid the chassis of the robot would get in the way of the sensor, spoiling the measurements, but thankfully the working angle of the sensor is sharp enough to avoid any changes on the structure.
I also added two LEDs to report the readings of the ultrasonic sensor. The red LED lights up when a obstacle is found, while the blue one is on when the path is free.
Up next: Programming and then battery.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.