The upper part of the robot is Art4Body.
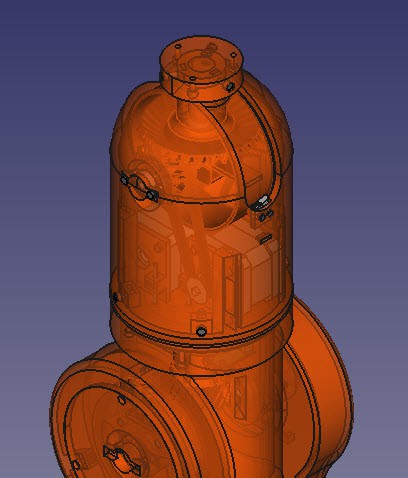
It consists of multiple parts that must be printed, an axis, ball bearings 2 motors, a electronic switch and a driving belt.

This is how the 3D printed version looks like. To get a sense of dimensions, it is 18 cm high.
The dome is printed separately since it needed support structures. To reduce printing time I printed the dome top separately decreasing printing time, then glued it together.
The axis is held in place by these ball bearing holders. They are not screwed in yet because I don't have all the parts yet.
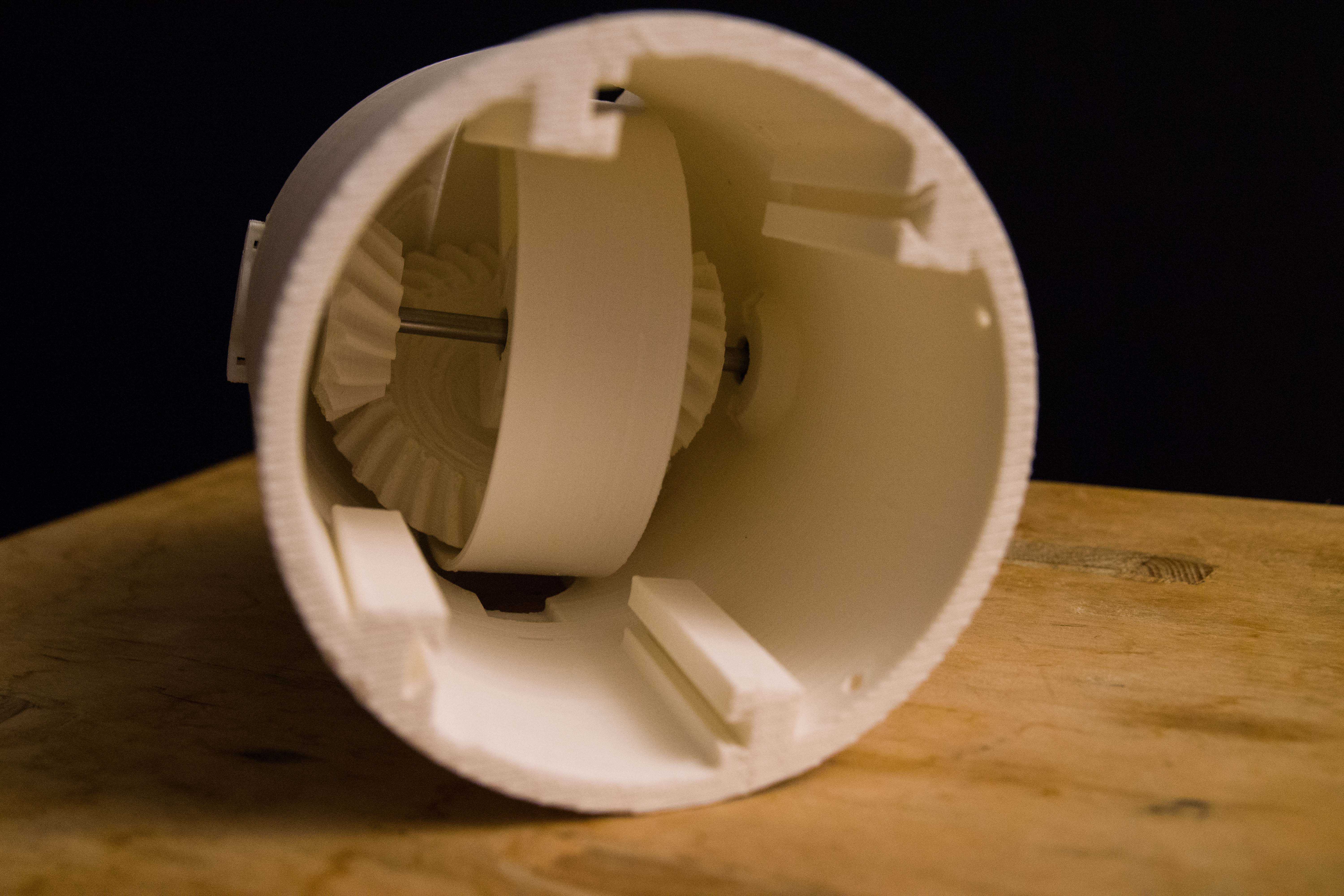
The idea is that if both motors move in the same direction then the hand gets up and down. When they move in opposite direction then they rotate the hand.
During assembly I discovered that it is not easy to assemble this part. I am wondering if that part cannot be redesigned so that it is easier to put together.
Also the hand part itself is not very clear how to assemble correctly. It appears pretty lose but more on that part later on.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
A colleague pointed me out asking why there is a gear box? Why there is no one motor to rotate the hand and another one to change the inclination?
I think that the Thor designer wanted to have 2 motors working so you have double the power for any direction.
Are you sure? yes | no