 TeamSG
TeamSGHey, ho!
Yeah, been away from here for some time. Other priorities have crashed the rover project to a large extent, although there has been progress.
So, quickly...
- Got the threaded inserts finally and put them all in place
- Finished off the core chassis mechanical build with the differential & tie rods
- Assigned the servo IDs - I just matched the standard scheme here for simplicity
- Got the Pi sorted - Sawppy-tuned SGVHAK software loaded, wireless access point enabled
Having achieved all that I figured I'd go for a servo bench test before I go screwing it all together. This is the kitchen table right now.

And this still picture is a perfectly accurate representation of the action on the bench right at the moment, 'cos it aint working :)
The software seems to be doing it's thing, but the servos aren't responding.
Witness the Chassis Configuration screen after an Angle / Velocity command from the interface.
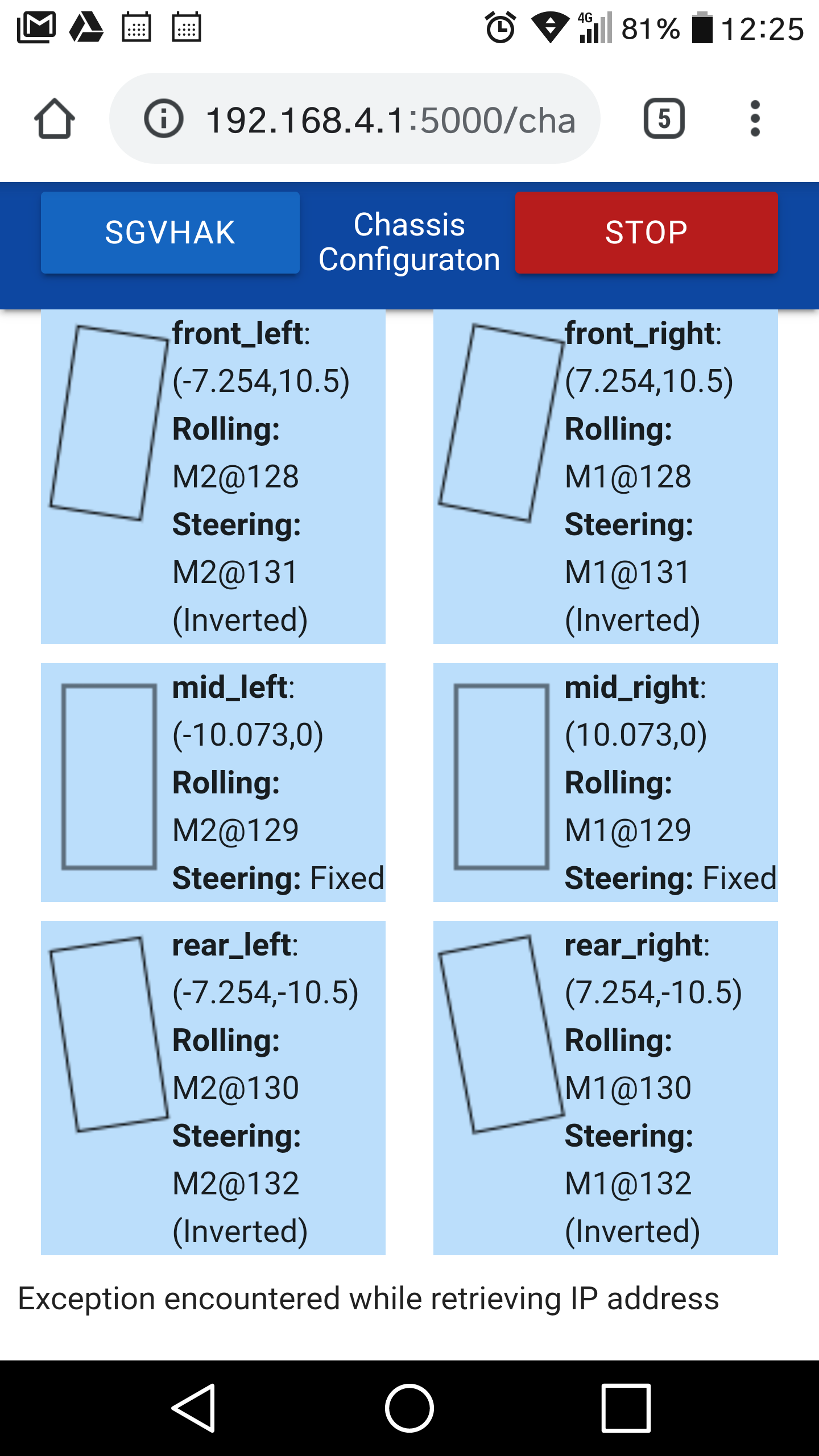
I'm thinking that the last line on the screenshot above is the issue. I have no idea what that means though, just at the moment. Gotta work that out when I get a chance.
For me and this kind of stuff, it's a case of trying something and then troubleshooting my way out of failures, learning as I go. I'm not sure it's a terribly efficient way of working - the google rabbit holes you jump down in search of (cascading) answers takes up time & energy. She'll be right though.
Anyways, having come to a frustrating halt here I have other things to do this arvo so I have to pack it up and try again at a later date.
I've always said this is a WWII job ("over by Christmas") and that's still the goal. Less that 50 days to go though now.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
The Chassis Configuration screenshot identifies motors as M1@128, etc. This identifier is consistent with the software running in RoboClaw motor controller mode, which is correct for SGVHAK Rover but incorrect for Sawppy's LewanSoul servos. Since LewanSoul servos would ignore RoboClaw commands on the serial bus, it might explain why you see no motion.
If you were following the instructions posted at https://github.com/Roger-random/Sawppy_Rover/blob/master/docs/SGVHAK%20Rover%20Software.md you might have missed the critical last step "Overwrite Rover Chassis Configuration File"
The "Exception encountered while retrieving IP address" error is odd, and probably worth tracking down, but it should be independent from motor motion code.
Are you sure? yes | no
Hi, Roger
Thanks for the detailed heads-up there - it's muchly appreciated.
TBH, I naturally assumed that I must have done something wrong when it didn't work like it says on the packet. My next step was going to be to run through all the instructions again to see if I'd missed a step, botched a text string or perhaps *didn't save something*.
As soon as I get a few hours free I'll check the contents of that .json file. I seem to recall that I shifted the updated file over as per the last step, so I'd say that I skipped the "always save you work" bit.
Thanks again :)
Are you sure? yes | no