 Cees Meijer
Cees MeijerThe whole 'Autonomous' thing is still in the future, but I suppose I'll have to continue. After some failed attempts to create my own remote control using some 'Long Range NRF24 Radios' I gave up ,and simply bought a complete Remote Control with 6 channel receiver. The HotRC HT 6A seemed like a good (cheap..) choice.
It's a cheap remote control unit, preconfigured for use with model airplanes. Which means that the controls assigned to specific channels and the output ranges are different per channel. The speed control channel (nr.3) outputs a PWM signal of exactly 1000 to 2000 uS, but the direction channel only has a span from 1200 to 1800 uS, probably optimal for controlling the rudder servo.
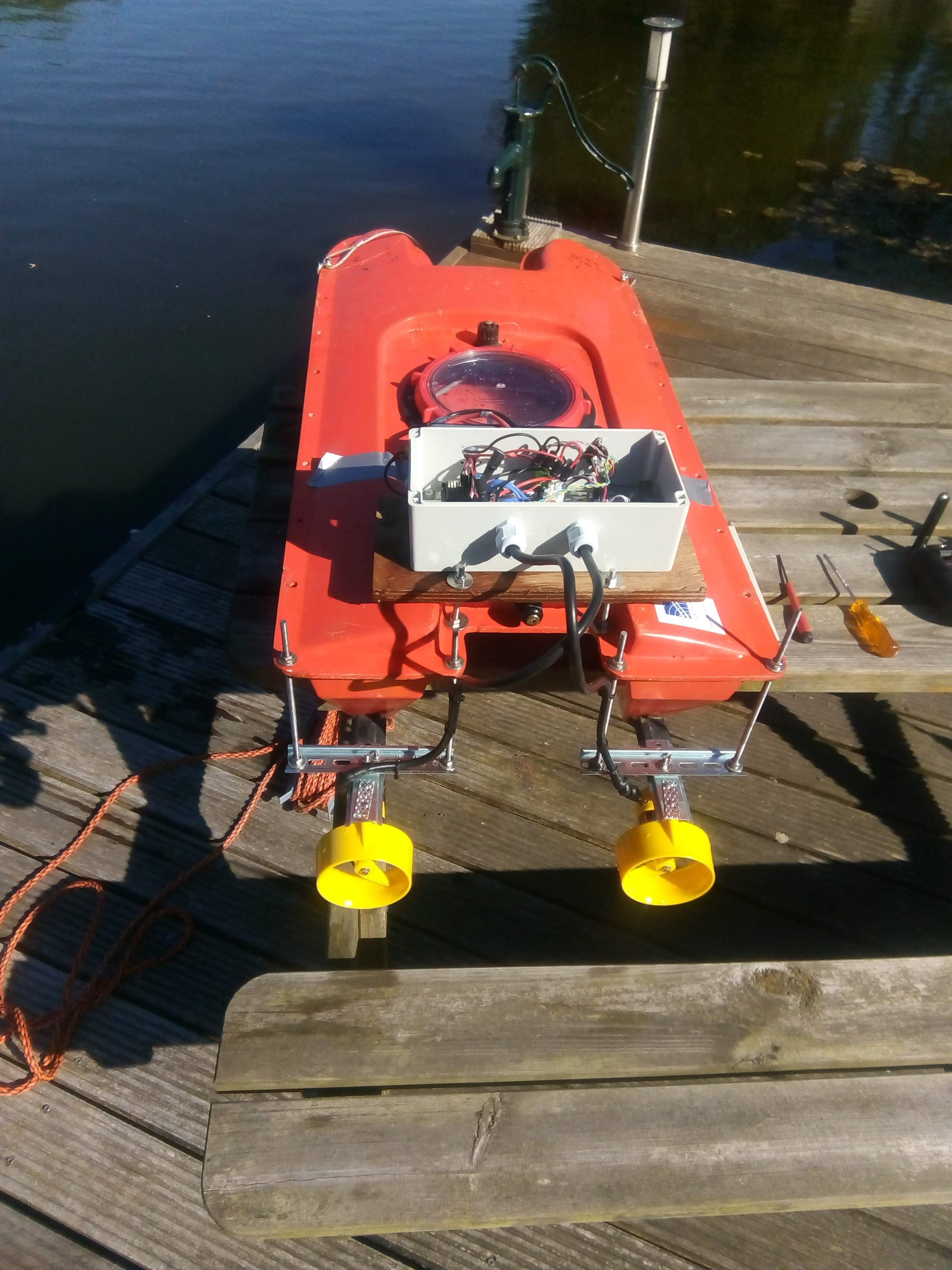
The boat only has two thrusters, and no rudder. So all the steering has to to be done by varying the thruster speeds. And if we for example are going forward and want to steer a little to the left, the left thruster has to slow down. But for a sharp turn the left thruster eventually even has to run in reverse. A complicated math thing, so I left this to my daughter who studies maths at university... And she came up with a reasonably simple relation between speed and direction that could be used to control the motors. This of course required some intermediate processing so I added a Arduino Pro Micro to translate the RC PWM signals to the appropriate thruster signals
Despite all numbers seeming to be correct, the boat reacts quite unpredictable. Only full speed ahead seems to work fine, but breaking and reverse is not working, or very slow. After checking and re-checking the code I finally find the answer in the user guide of the ESC. By default the ESC has some behaviour that is good for using in an RC Car, but not for the boat. Fortunately I bought the ESCs with a 'Programming Card' which makes programming easy. First I had to modify the break-behaviour. By default the system breaks the motors to a halt if you suddenly pull it to reverse. But I want it just to go in reverse, no stopping. Second I set the maximum reverse power to 100% instead of the standard 25% .
Later I found out that this is actually known as 'skid steering' and supported by ArduPilot (https://ardupilot.org/rover/docs/rover-motor-and-servo-configuration.html#skid-steering) as well. And the code for this comes pretty close to what we figured out. (look for the void AP_MotorsUGV::output_skid_steering(); function in the ArduPilot Rover code.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.