NEBRA Labs
NEBRA Labs-
Mooba's Functional Architecture
10/18/2019 at 18:58 • 0 comments![]()
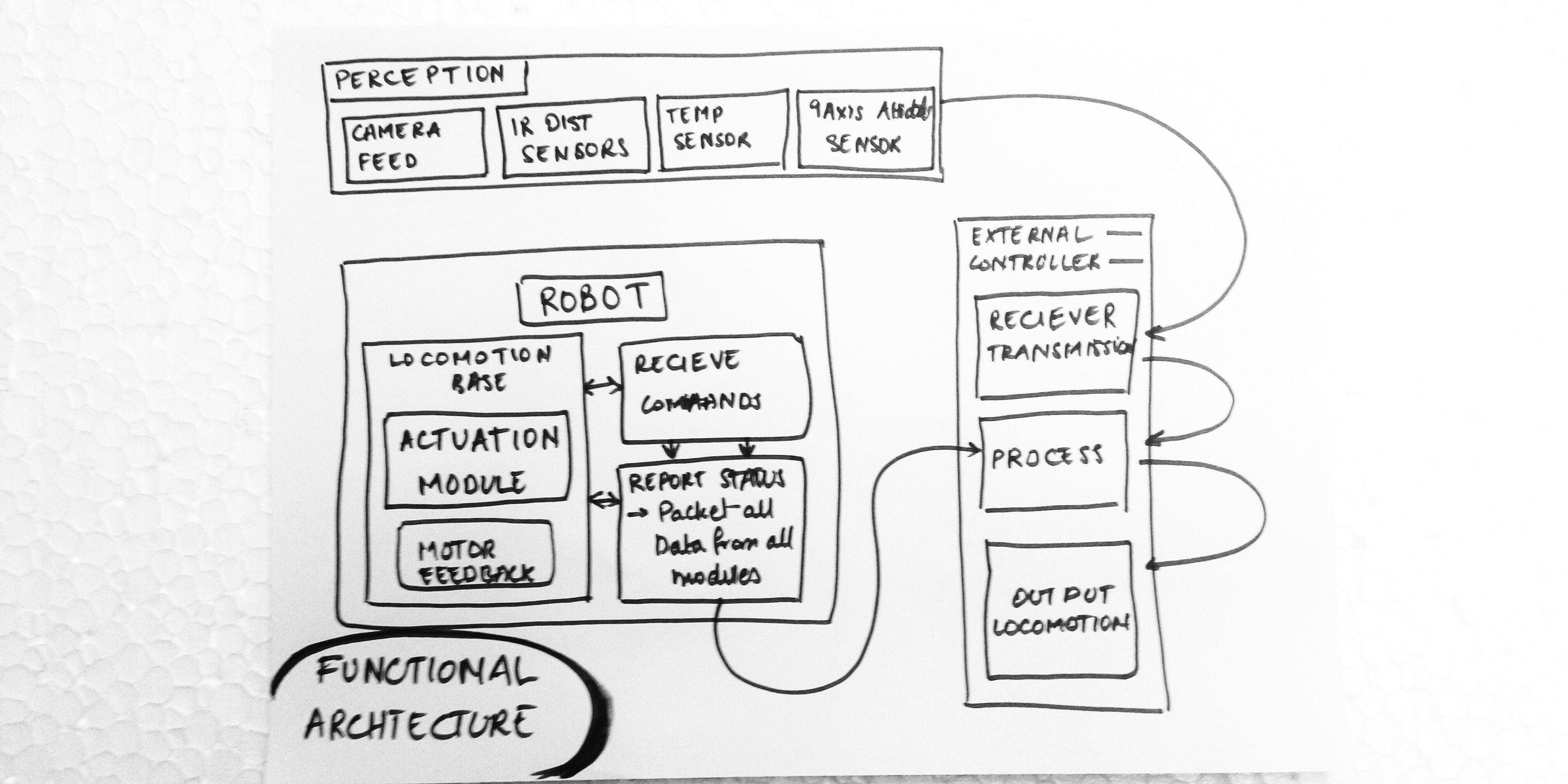
The functional architecture is intentionally generic due to the multi-functional nature of the this platform. In order to fulfill requirements, the robot system must be capable of executing wide array of tasks as well as accommodating user-designed modules. The primary functions of this robot are encapsulated in its external controller, perception system, locomotion base, sensor module, and actuation modules.
The Mooba system begins with vision or user input into an external controller. This controller is a computer communicating with the locomotion module over SPI and I2C comm channels. Once the locomotion module has received commands from the external controller it will process the transmission and send appropriate commands to the actuation modules. The actuation modules will have motors and wheels to move the robot as commanded by the user and report motor status back to the external controller through the locomotion module. The perception system will send data gathered by its sensors to the external controller through the locomotion module. The input as images can be changed for dead reckoning to a user provided goal. The external controller acts as the interface between an external perception system or a user and the locomotion base.
-
General System Requirements
10/18/2019 at 18:27 • 0 commentsFunctional Requirements:
- Standard perception model should be able to transmit a video feed of 640x480 resolution at 30 FPS
- Mooba will have a field of view large enough to be able to perform locomotion and manipulation tasks. This field of view will be at least 180 degrees horizontally and 60 degrees vertically.
- In order to accomplish a line following task, the robot shall be able to detect a 0.5 inch width black line on a white background.
- Given sensor input, the robot shall create a path plan from its current location to a desired location in a flat 10x15 foot room.
- The robot shall be able to loco-mote at a speed of 0.2 meters per second on a flat, smooth surface.
Non Functional Requirements:
- Durability is perhaps the most important of the mandatory non-functional requirements. If our mobile robot platform is not highly durable, the modules could simply disconnect or the whole platform could break during normal use. No user would be satisfied with a system that performs this way.
- If the robot platform is difficult to assemble and/or disassemble, the modularity of the platform will provide little benefit to the user. Because of this a user will be able to remove a module and add a different one to the robot platform in less than 1 minute.
- The platform must be capable but not too expensive.
- Mooba should highly appealing in looks. Engineering and design shall be seen in every revision.
Desired Non-Functional Requirements:
- There could be a tracked or legged locomotion module in addition to the standard wheeled locomotion module. The additional modules could even be in an entire new category, such as sumo modules that would allow robots to battle.
- There can be an option to replace standard wheeled locomotion with 3D printed meccanum locomotion for higher maneuverability.
- The Mooba robotic platform shall allow users to construct their own modules easily.
Information Architecture Requirements:
- Information Architecture shall describe the inputs and outputs of the object
- Information Architecture shall describe relevant physical dimensions of the object
-
Problem Description
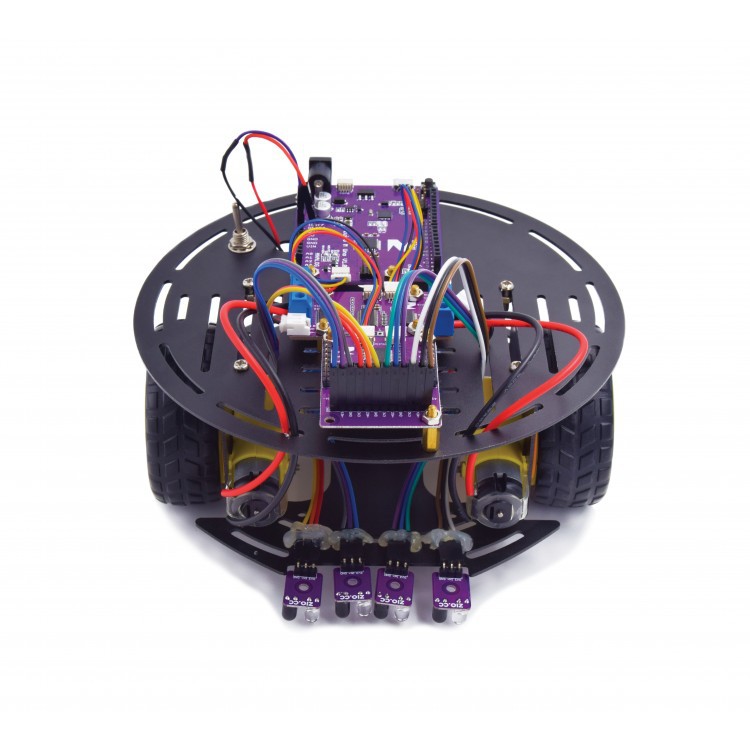
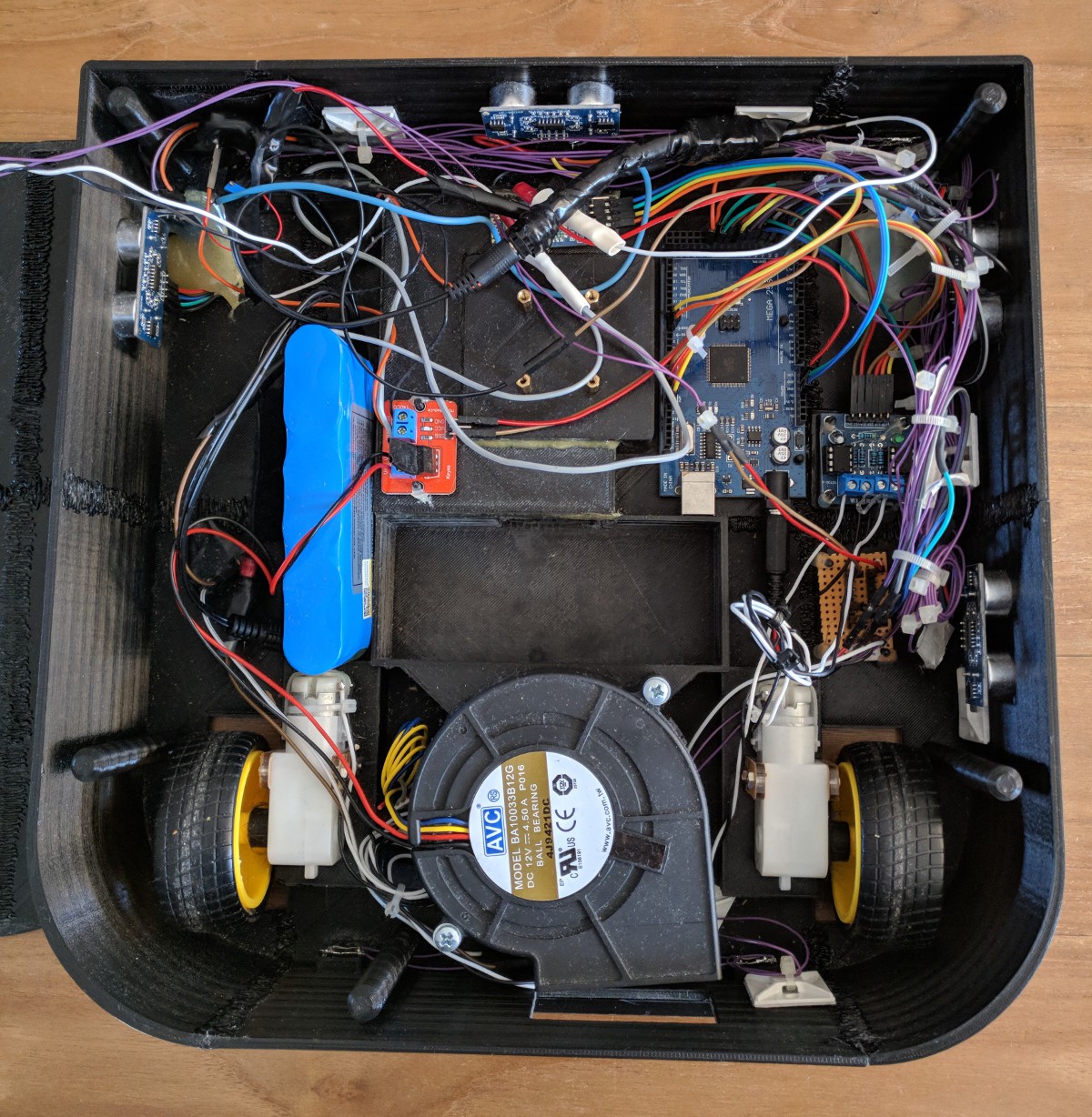
10/18/2019 at 17:20 • 0 commentsRobotic Platforms are used in plethora of projects where testing and use of mobile systems is essential. People use a lot of kits and custom designs but these offer less modification and they look a lot less appealing than they should. Commercially available robotic platforms such as Mindstorms allow less modification, besides, it is expensive.
![]()
![]()
![]()
This project aims to disrupt the existing commercially available robotic platforms by offering a highly customizable, fully open-source, and highly appealing robot that can be used by researchers at a very affordable price-point.