0%
0%
Gigatron Forth
Attempting to implement Forth on the Gigatron
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Reed Foster
Reed Foster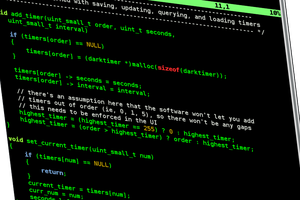
 Dangerpants Labs
Dangerpants Labs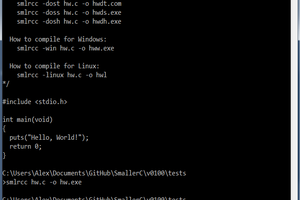
 Alexey Frunze
Alexey Frunze
Well done for doing this and congratulations on your progress!
I bought one a while ago, and I'm just getting around to assembling it now.
I'm very new to the software development environment. What's with the Python development environment? Is there a simple 6502 assembler?
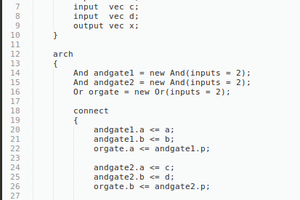
I'm wondering why you are trying to implement a word like NIP in assembler, when you can just implement it in Forth from the primitives you show. The less in assembler the better. Are you aware of the way Forth words are implemented in Forth in the assembler? Sounds weird doesn't it. Took me a while to understand people saying that Forth was implemented in Forth.
All of the precompiled words can live in EPROM, and system variables can be copied from EPROM to RAM at boot time. New words are created in RAM.
Anyway, I have much to understand, well done anyway.
Paul