 adria.junyent-ferre
adria.junyent-ferreI will explain this project step by step in the project updates. The roadmap is fairly simple:
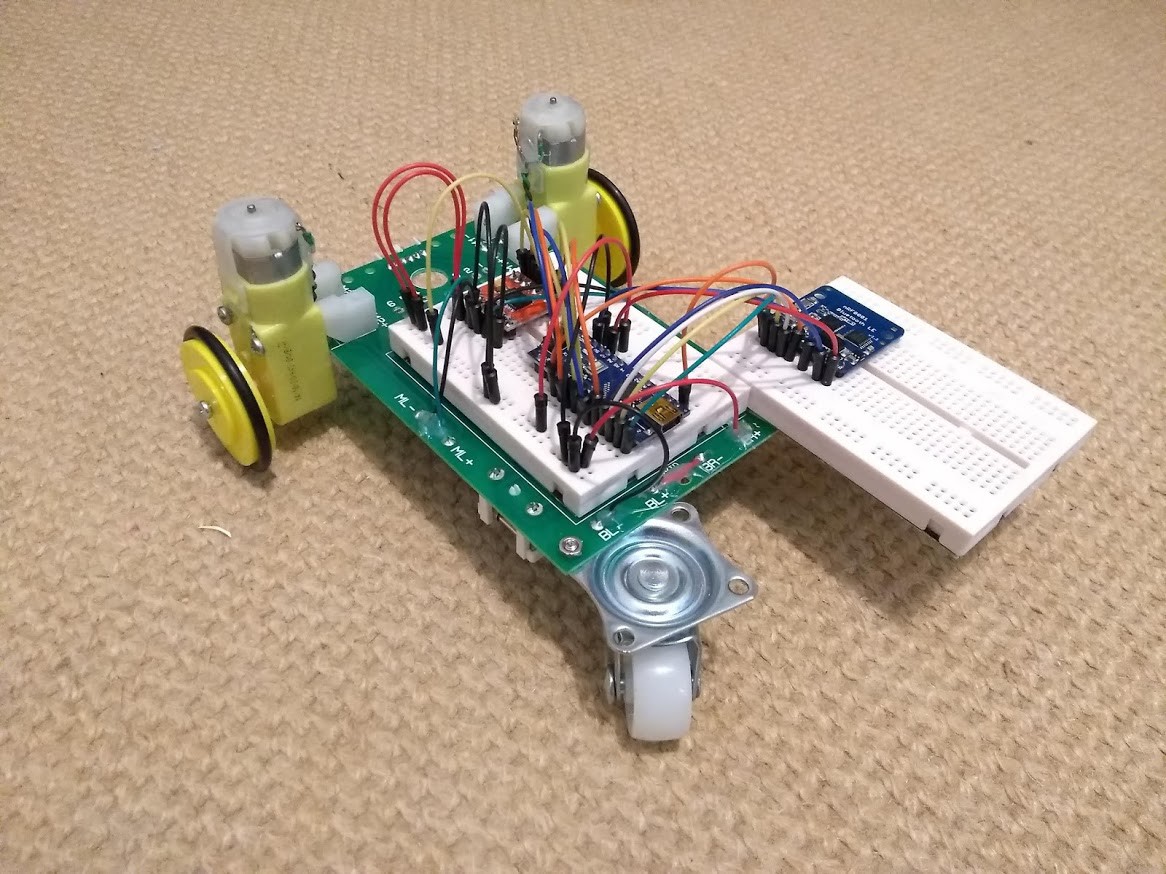
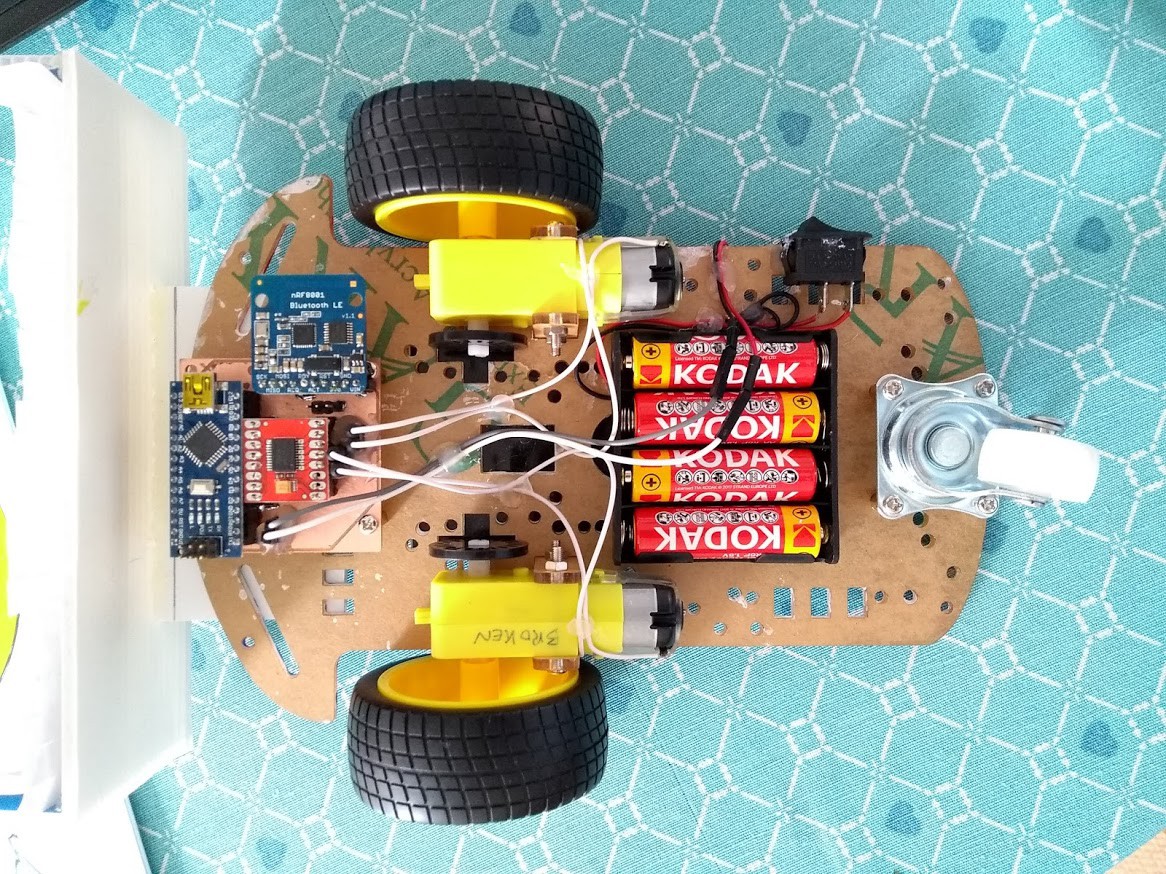
- Build a small Arduino-controlled autonomous turtle bot / robot car
- Implement BLE communications to be able to control the car from a phone/laptop/Raspberry Pi.
- Build a more sturdy prototype.
- Add a Raspberry Pi handling the bluetooth communications and providing a video feed for FPV.
- (potentially: use OpenCV to implement some basic autonomous driving)


 Ken Nakagaki
Ken Nakagaki
 David BC
David BC
 Cassio Batista
Cassio Batista
 Artur Majtczak
Artur Majtczak