Val
Val-
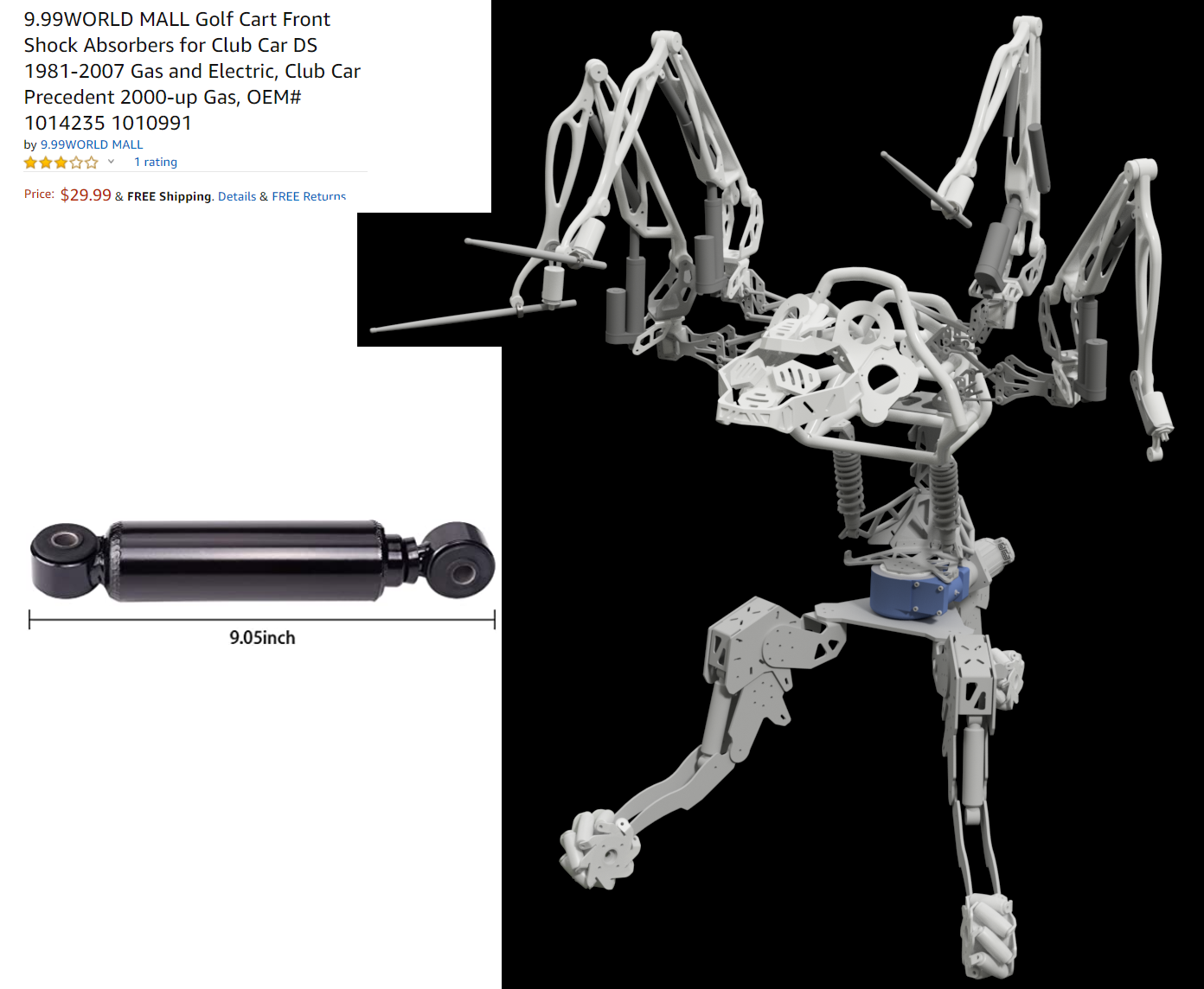
Leg Shocks
05/26/2020 at 01:41 • 0 commentsSpent really wonderful 2 hours searching for extra-short shocks for the legs. Finally arrived at a golf cart shock on Amazon.
![]()
-
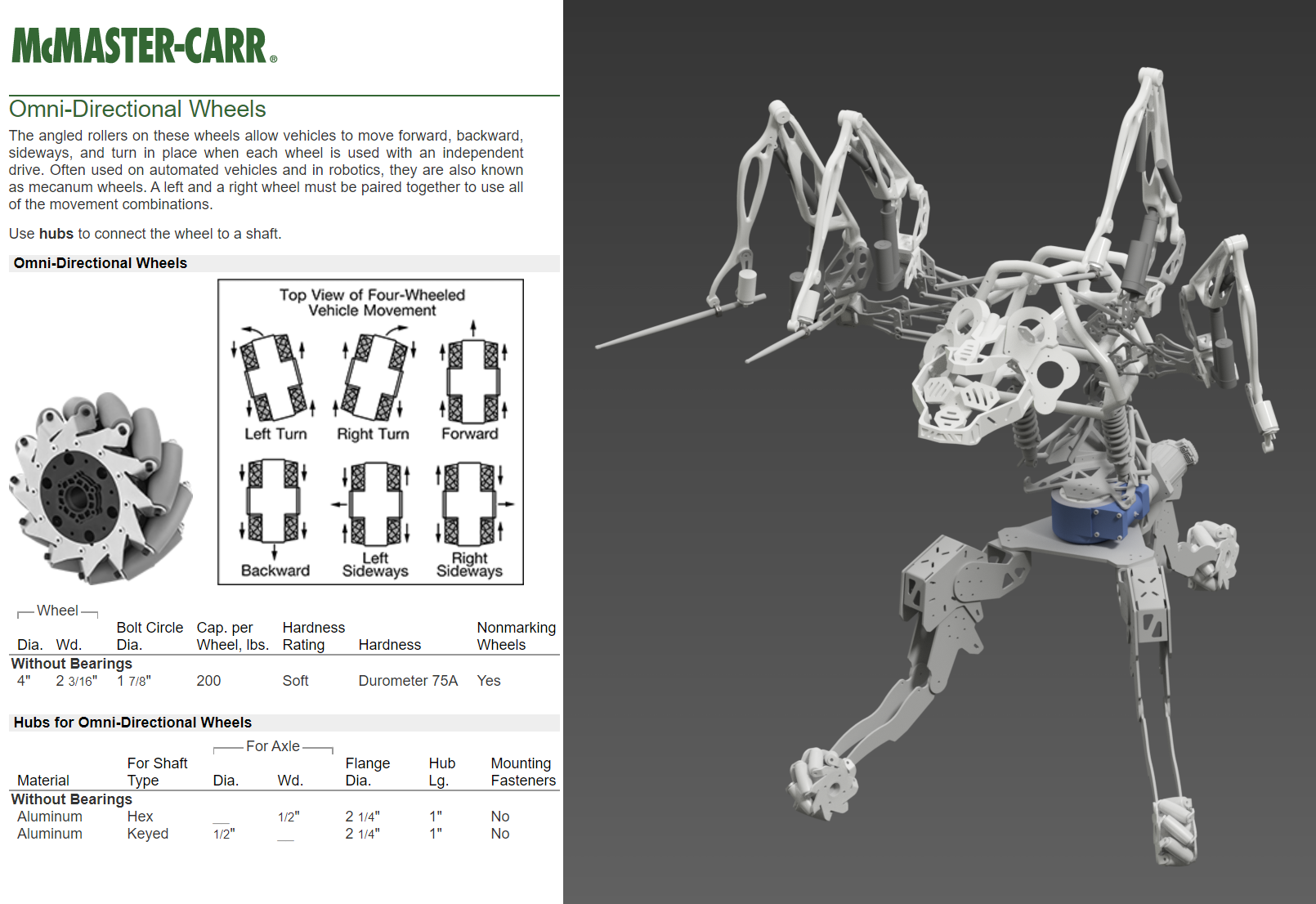
Mecanum Wheels
05/25/2020 at 19:03 • 0 commentsI am going to try to put 6" mecanum wheels on this thing - thanks McMaster carr! Truly space age stuff here.
-
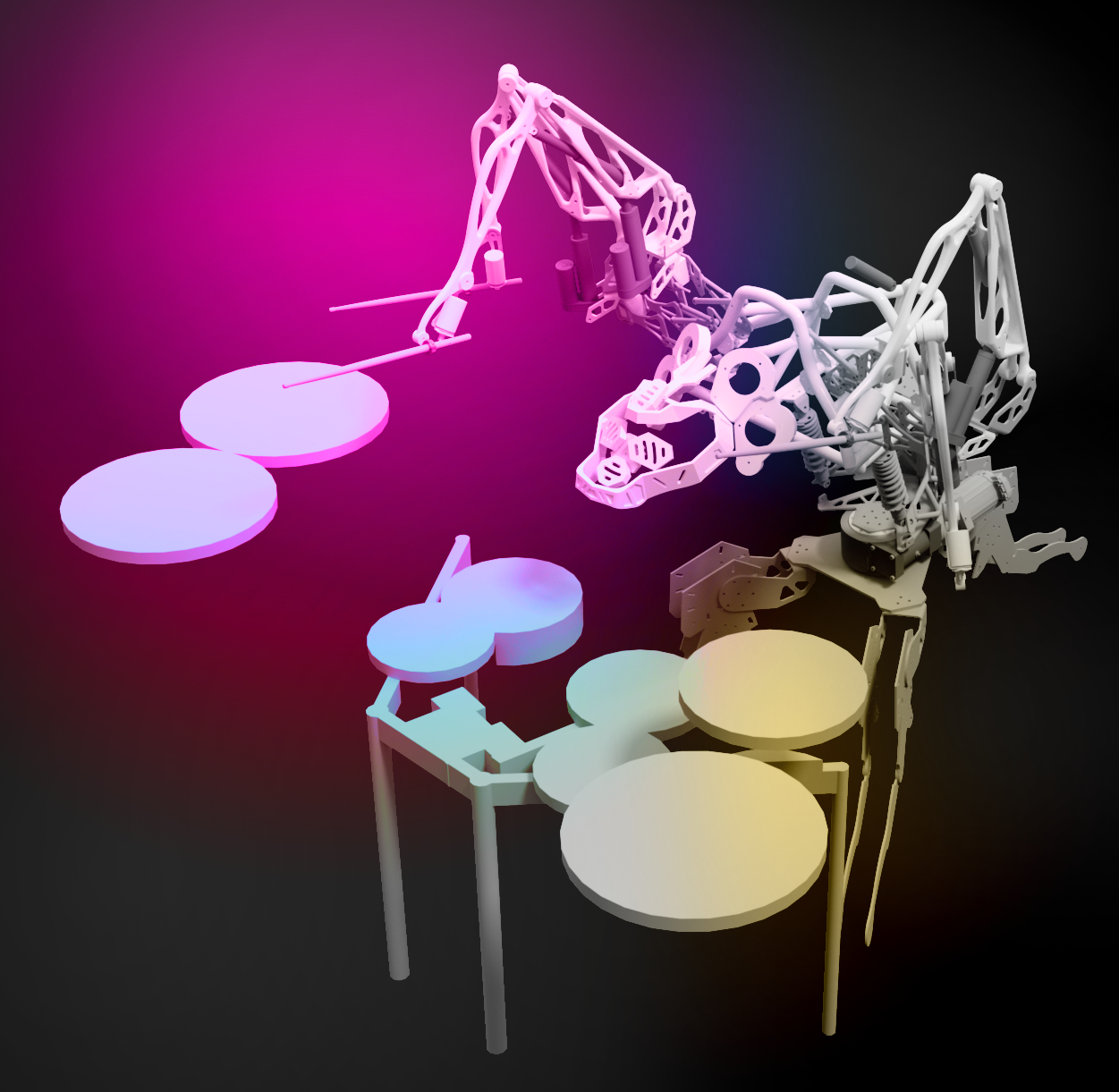
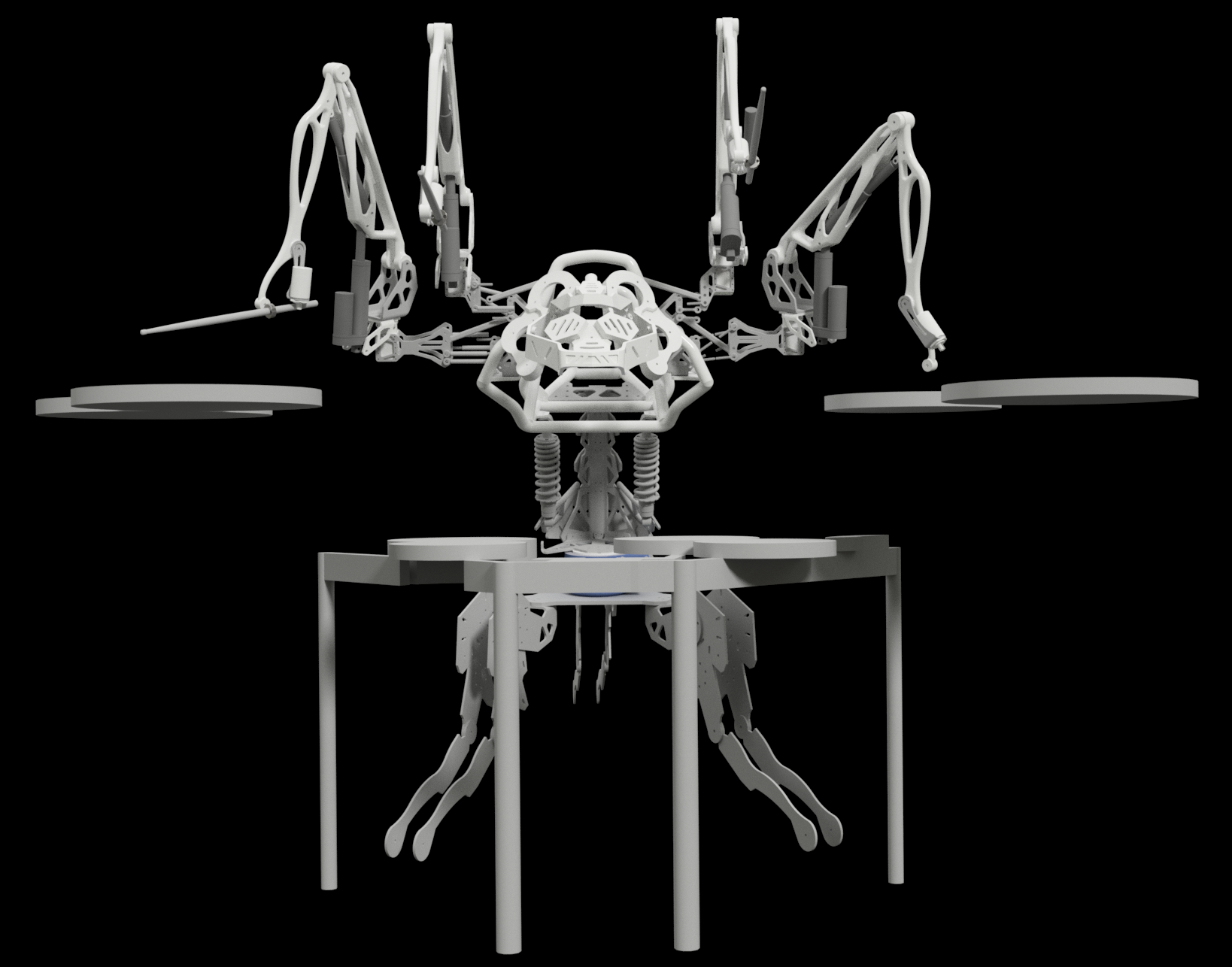
If it fits, it sits
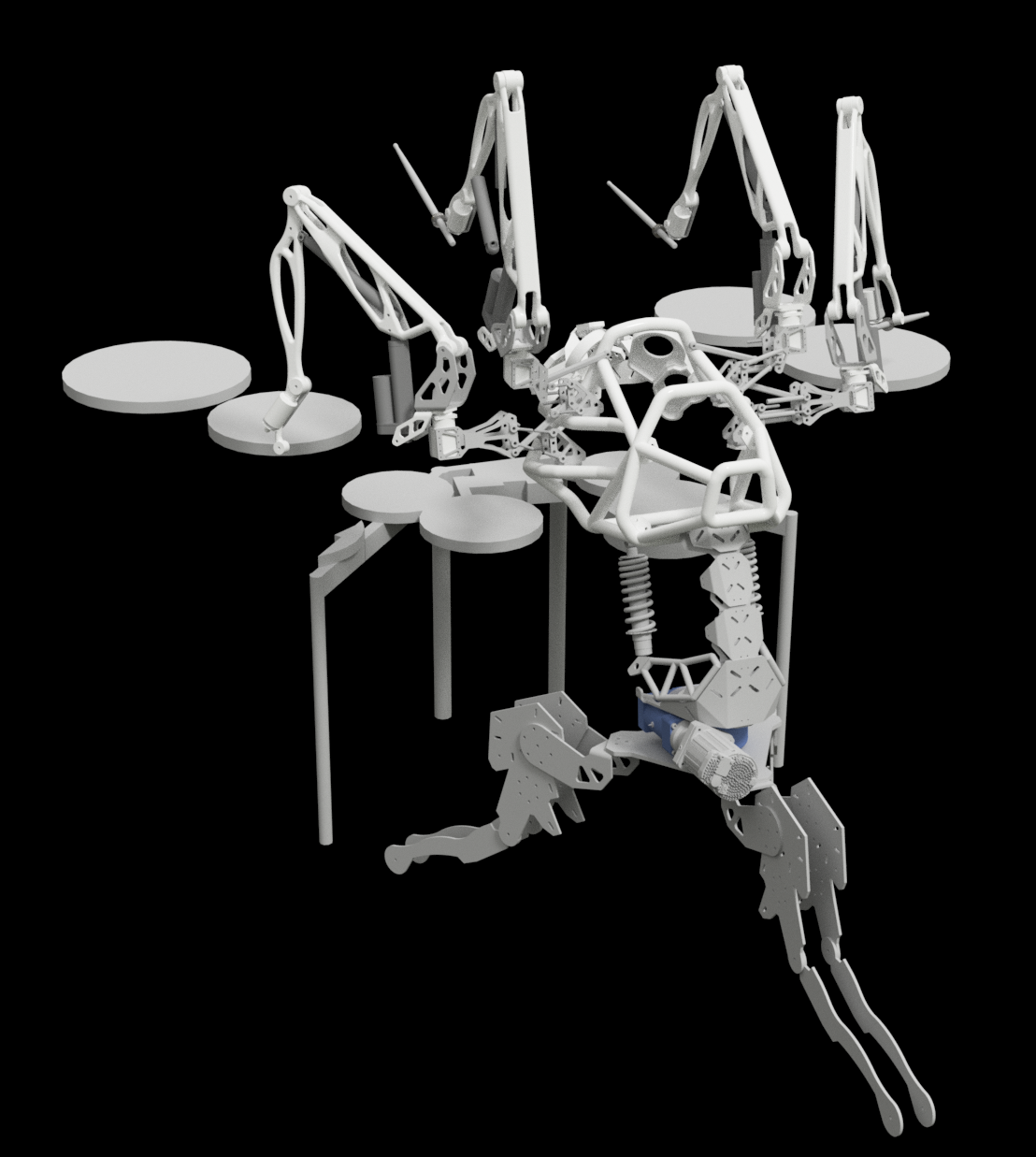
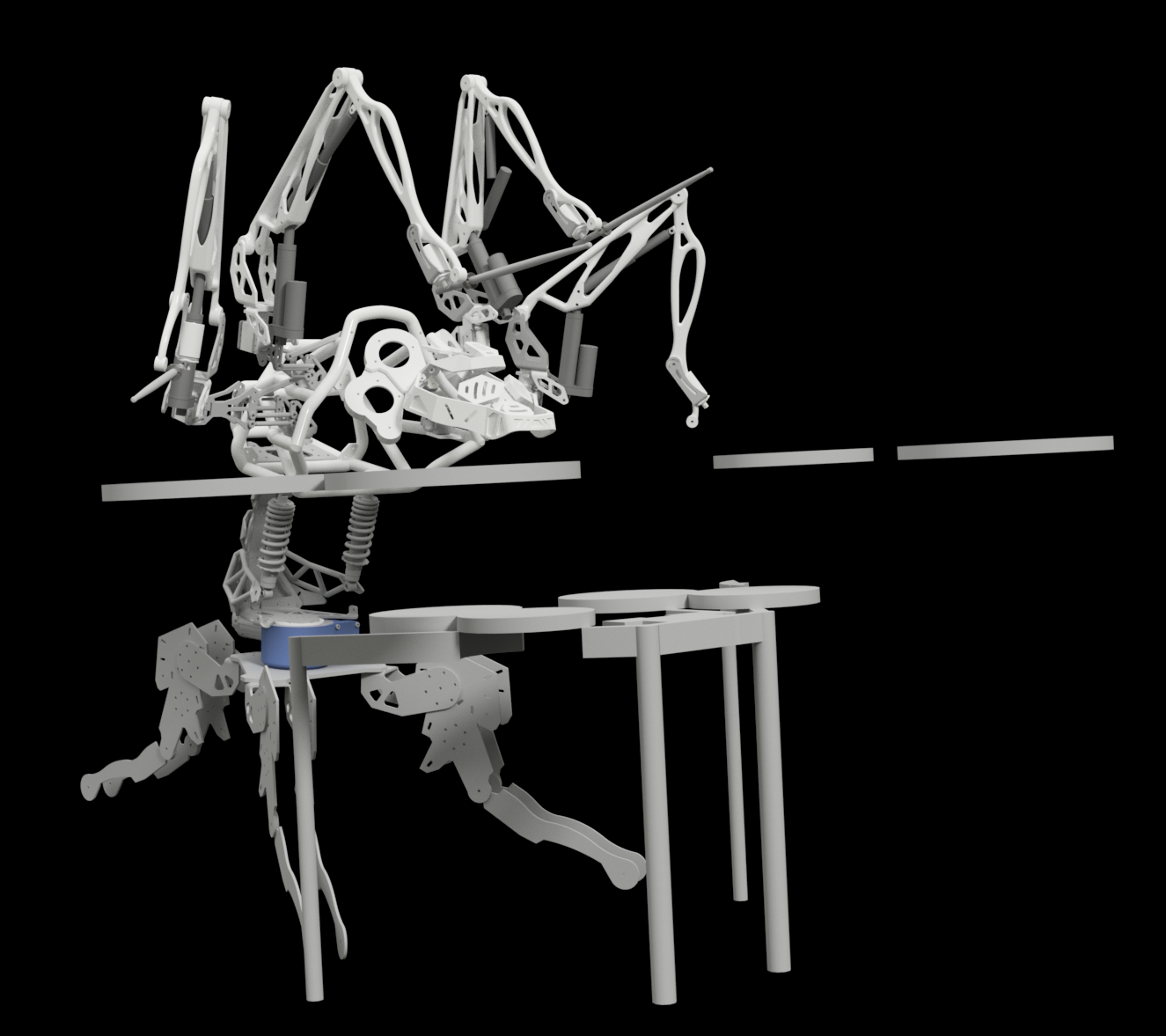
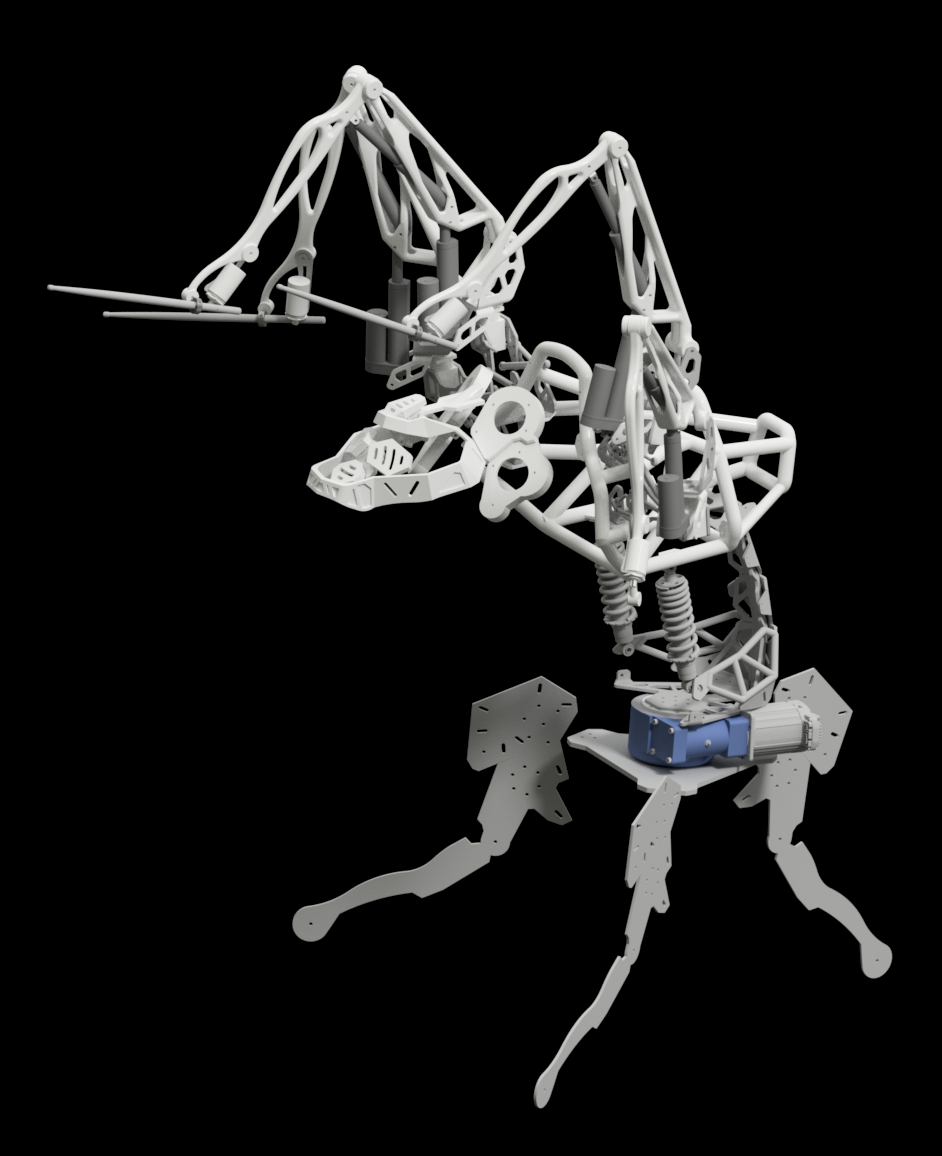
05/23/2020 at 19:14 • 0 commentsHaven't felt like doing CAD lately, going to take a 2-week break - but here are some renders with roughly blocked out legs next to a blocked out drum set. They will have internal spring shocks on them as well, and I am thinking whether I need to rotate the front legs or leave them fixed.
![]()
![]()
![]()
![]()
-
Shocks arrived
05/22/2020 at 01:46 • 0 commentsI tried to pin down a set of shocks that I can include in the assembly, but they kept going off market. The problem is that they are extra short (for a motorcycle) and extra long (for a bike) so basically I had to order them before all other parts, just so I could depend on a specific part to include in the virtual assembly.
![]()
-
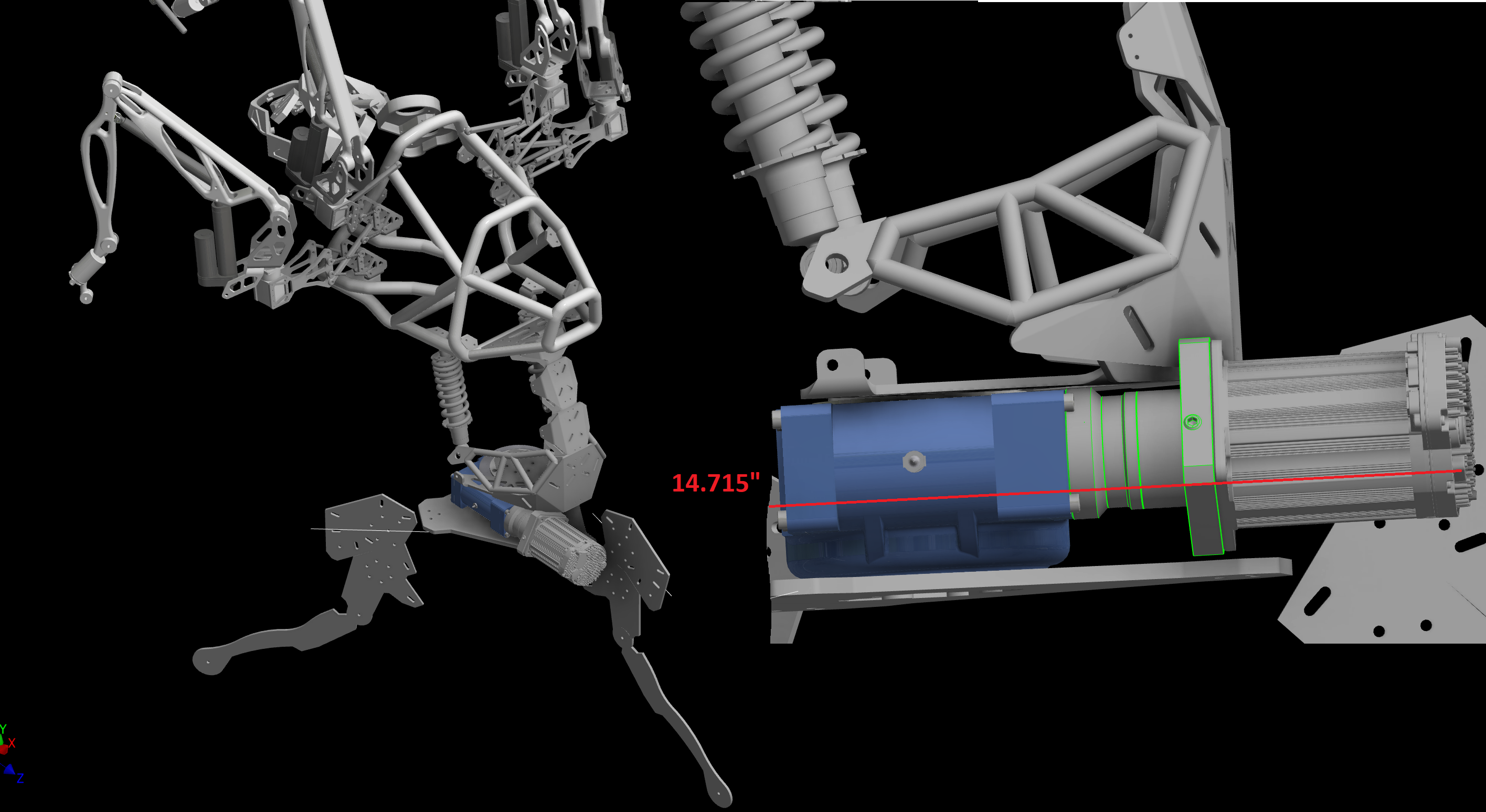
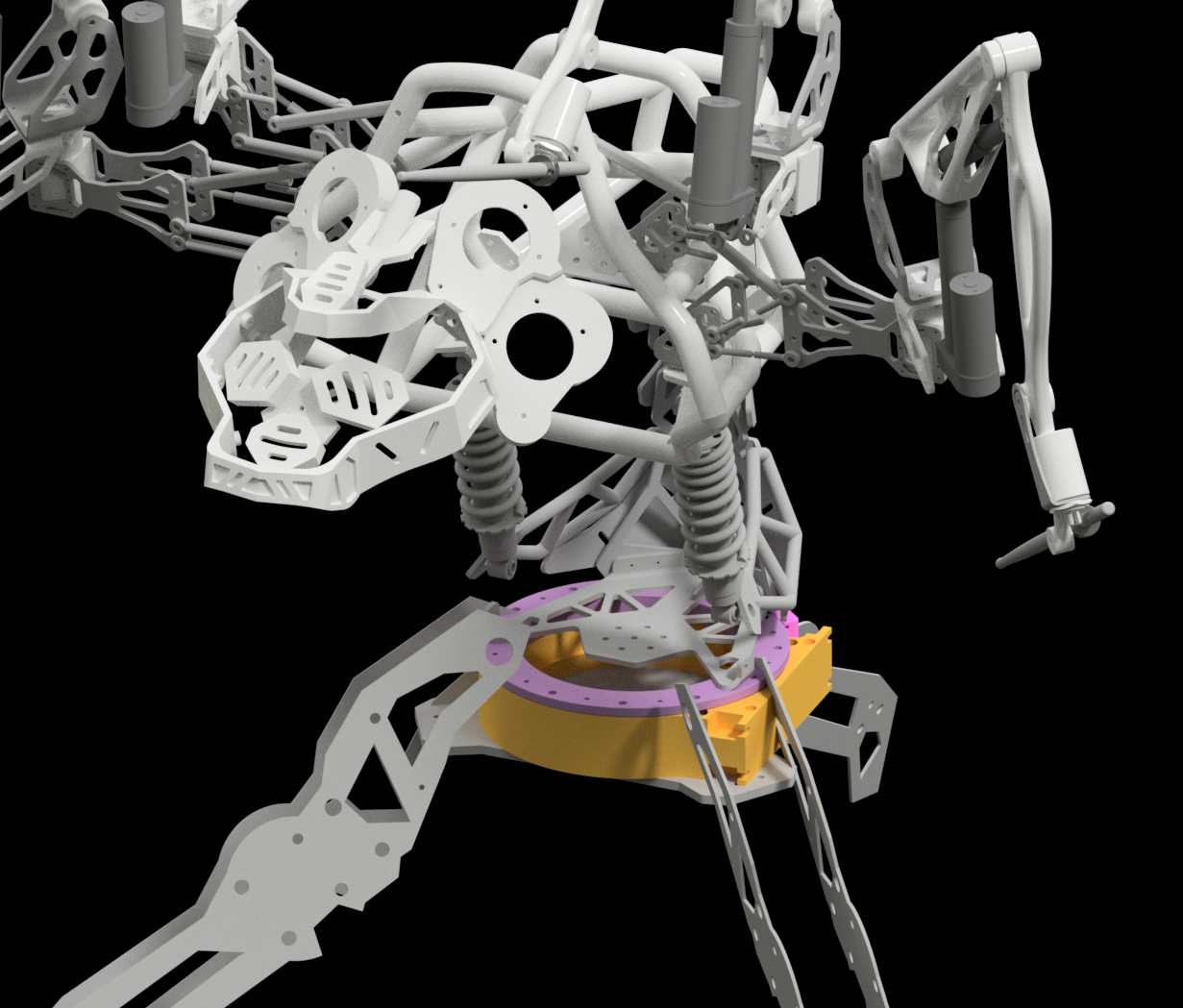
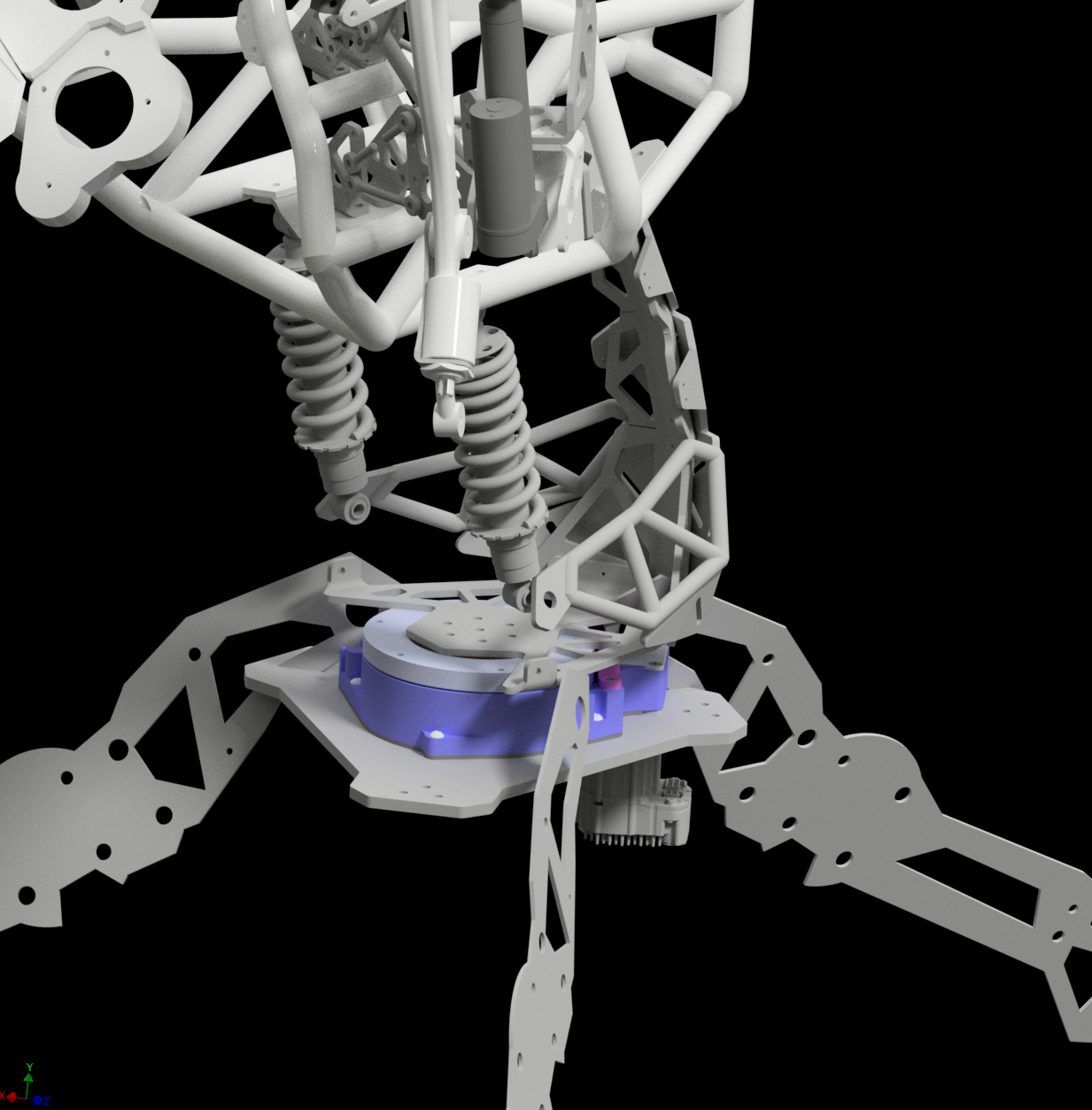
Gearbox and Adapter
05/21/2020 at 19:50 • 0 commentsStill working to pick the gearbox and adapter for rotating the torso. Doesn't look too unsightly:
-
Torso and legs
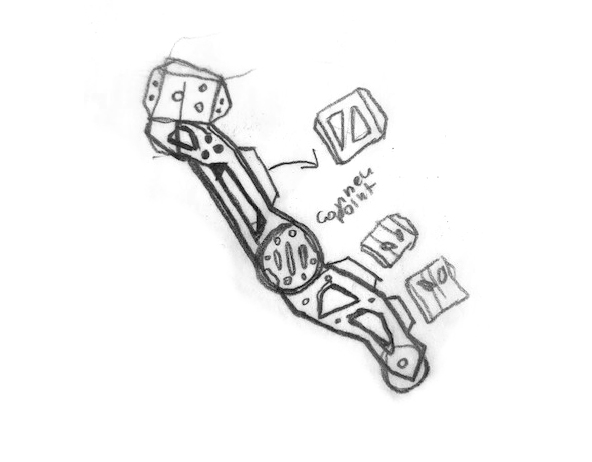
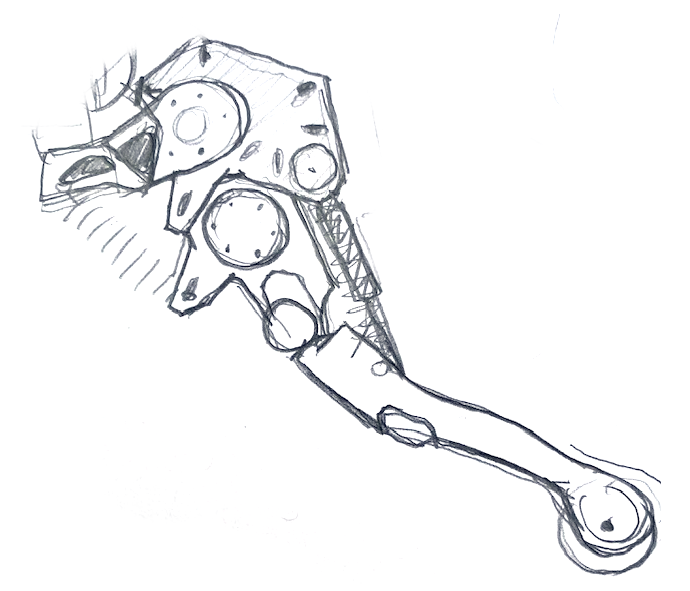
05/18/2020 at 20:20 • 0 commentsSlew drive was picked, NEMA 34 DC motor picked. I started working on the legs while I am waiting for the gearbox STEP model to install in the assembly for a final "what's it going to look like" render.
Leg: option 1 (decided I didn't like it)
Leg: option 2 (based on Pinterest art, but with my twist)
I blocked out the flat sheet metal parts for now, going get those dimensioned before I move onto making the leg 3D.
-
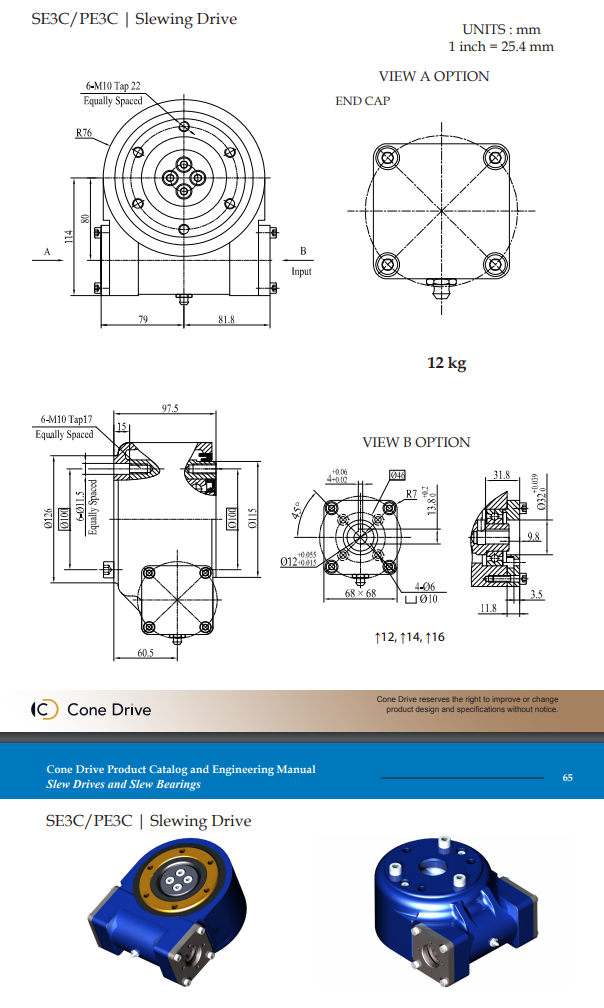
Stop Screwing, Get Slewing!
05/15/2020 at 03:29 • 0 commentsSlewing Drives are a lower-cost alternative to robot rotary platforms that trades precision for cost while still being able to support a lot of weight.
![]()
That is, it's a composite solution:
- The slewing drive that can take a 100 lb off-axis load, with a high gear ratio, but not too wide in diameter as to be excessively huge or heavy. It uses a worm gear.
- An extra gear box to up the gear ratio even further
- A beefy ClearPath motor popular in robotics
The company that manufactures it is called Cone Drive. The STEP file couldn't download so I am modeling it off 2D drawings to plug it into the virtual assembly.
-
Rotary Platform
05/14/2020 at 17:05 • 0 commentsZeroing in on a rotary platform from Bell Everman. It seems the $4k tag may be unavoidable to get something that works.
I got their STEP files, so here's a preview with 200mm rotary stage:
![]()
Here's a 100mm rotary stage (motor facing down):
![]()
-
Torso rotation
05/14/2020 at 06:08 • 0 commentsI got the shocks and drive links ordered, modeled, and installed in the virtual assembly.
![]()
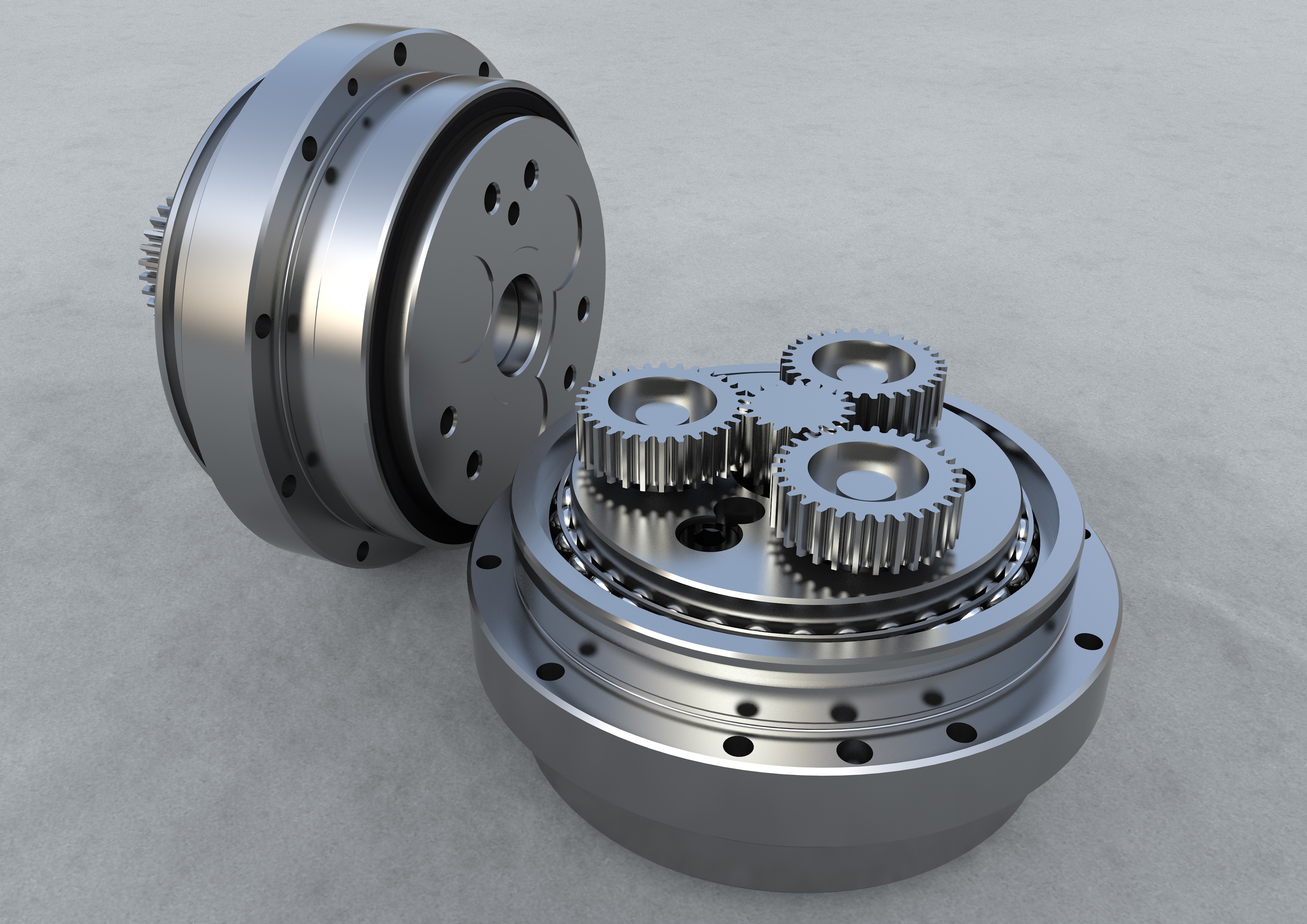
Next I am shopping for a hollow rotary reducer platform that will rotate the torso. Something like this:
![]()
Most DC motors that work well for robotics applications have lower torque and aren't designed to withstand a significant off-axis force (i.e. torso trying to fall over and rip the motor flange out of the motor). Planetary gear reducers solve this problem because they have bearings to counteract off-axis force, and between 5:1 and 10:1 ratio that makes it possible to use a low power motor to turn a great deal of mass.
Unfortunately the American-made rotary reducers are around $4000, and buying a Chinese one for $400 is pretty scary because there is no guarantee that it will ever be shipped, will work, or will arrive this year. Let's see what happens!
-
GitHub project setup
05/13/2020 at 20:00 • 0 commentsThis week I setup project management Kanban board on GitHub:
https://github.com/01binary/drummingrobot/projects/1
Last sprint I had a lot of trouble finding shock absorbers for the arms and the torso. Today I finally found RC car drive links that I can use for the arms instead of shocks, and small motorcycle shocks that I can use for the torso.
Drive links: https://www.amazon.com/Integy-Hop-ups-C27173SILVER-Machined-Suspension/dp/B076F3YCY9
Shocks: https://www.ebay.com/i/273547931664
Another task that I had trouble with for a while is sourcing a DC motor responsible for turning the torso. I looked at ClearPath motors but they are not powerful enough. Since I would like to run the robot on batteries, AC motors are not a good option. It's likely that I will need planetary gear rotating platform or something else that will let me use multiple weaker DC motors to turn the torso.
The servos responsible for rotating arms are over $1000 each (Dynamixel Pro) so I would rather not get a $4000 motor for the torso in addition to that - too wasteful on the resources since torso motion is not critical to this design.