 Tijl Schepens
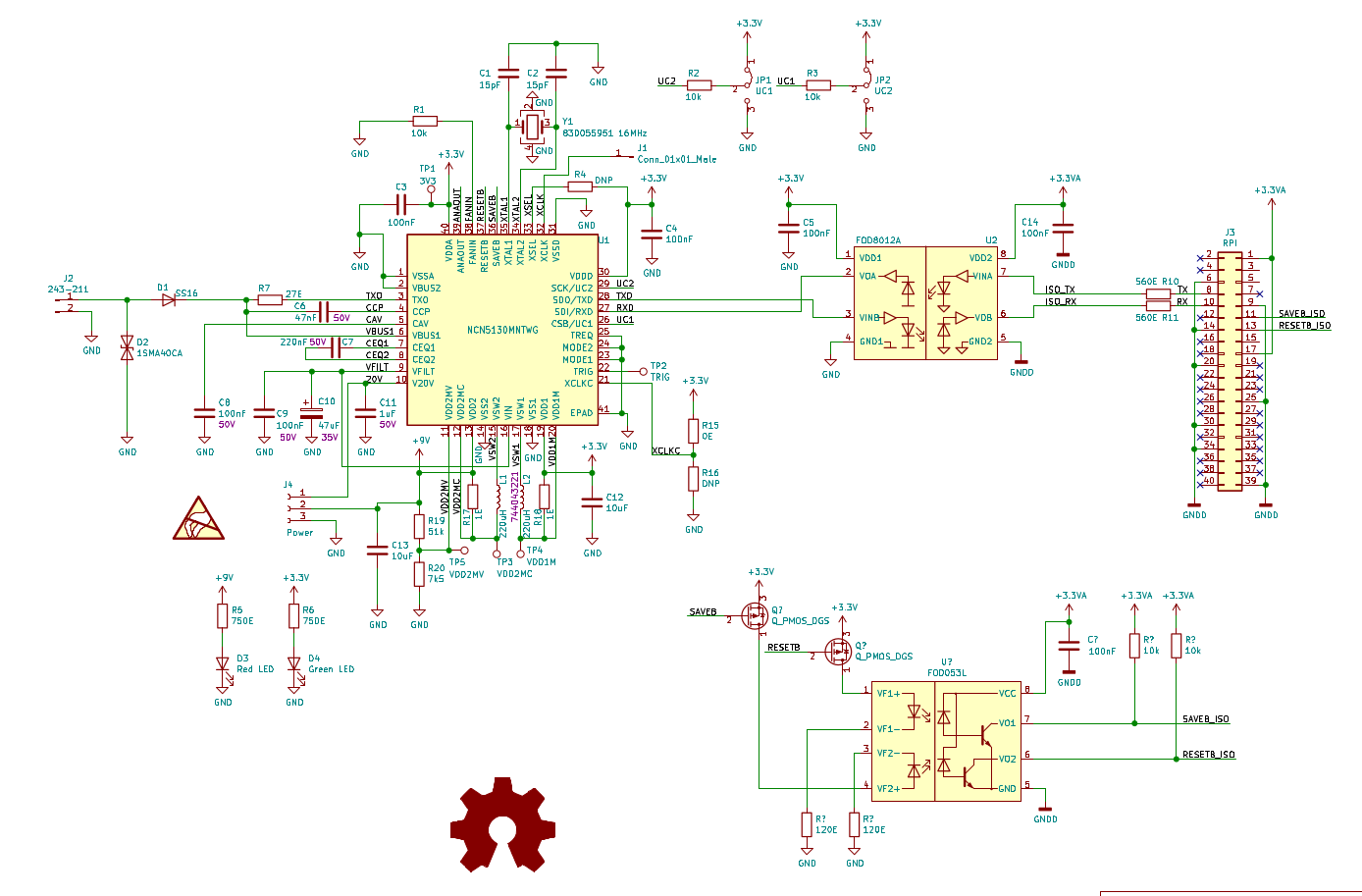
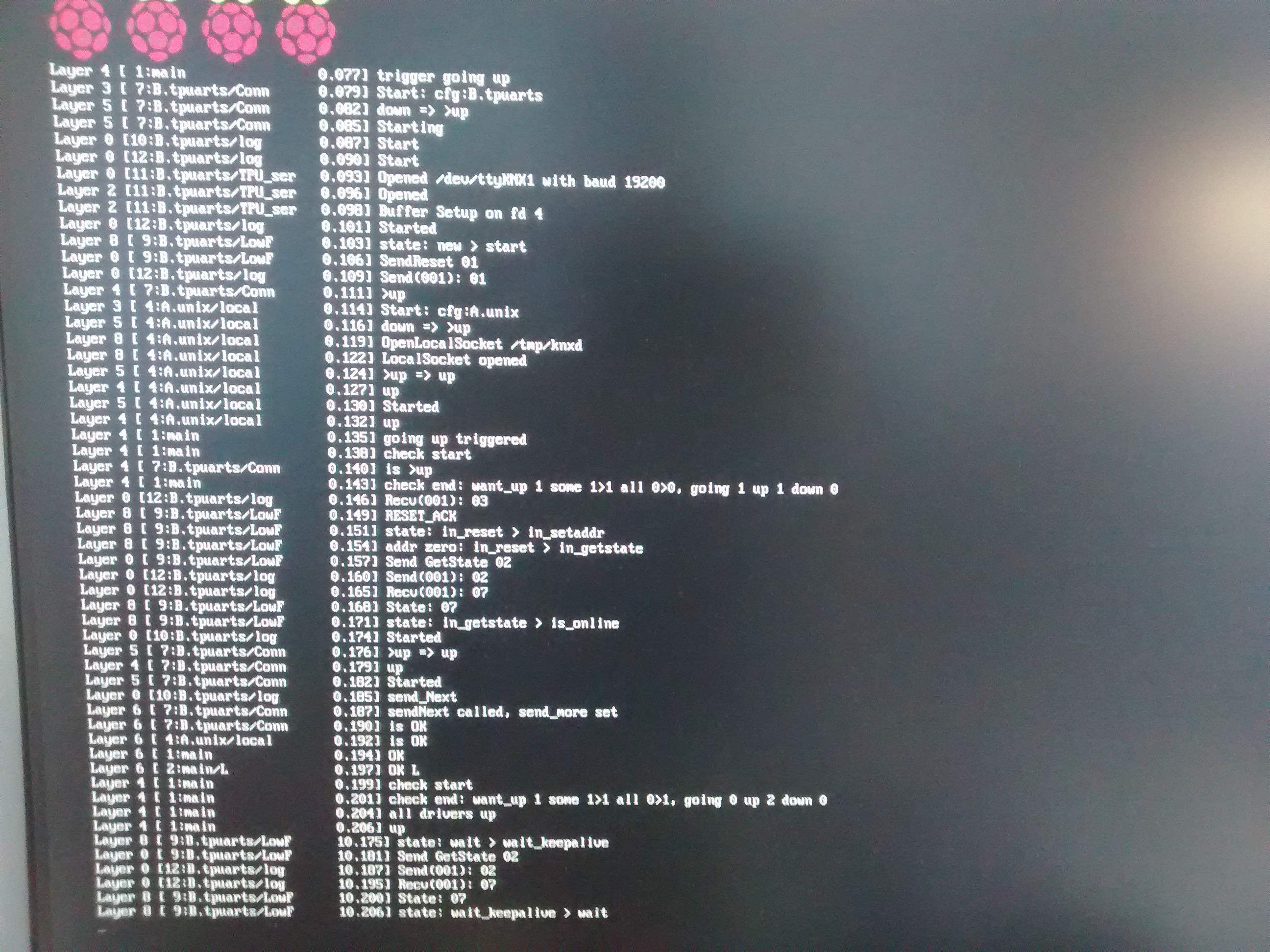
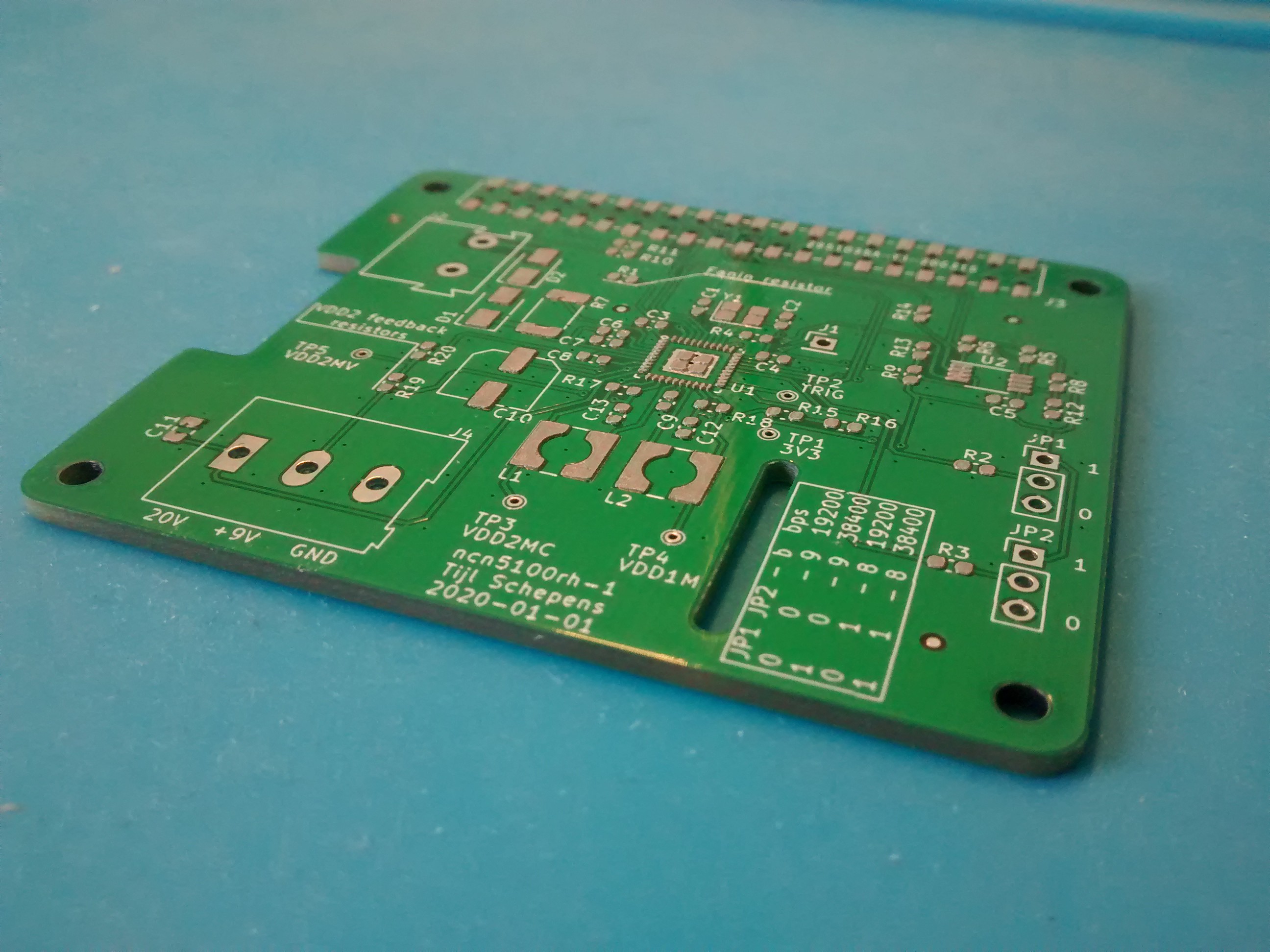
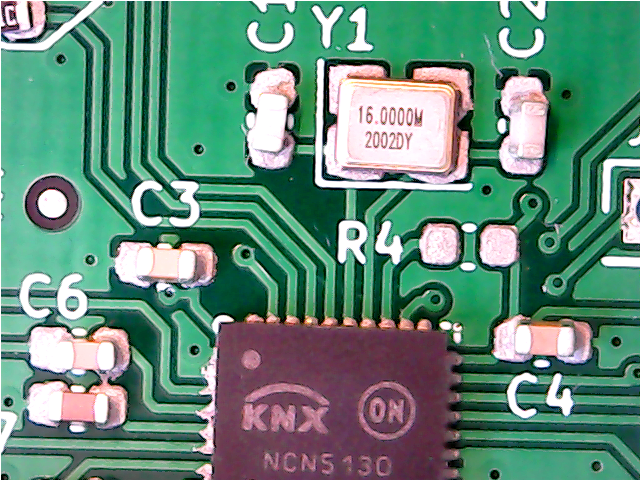
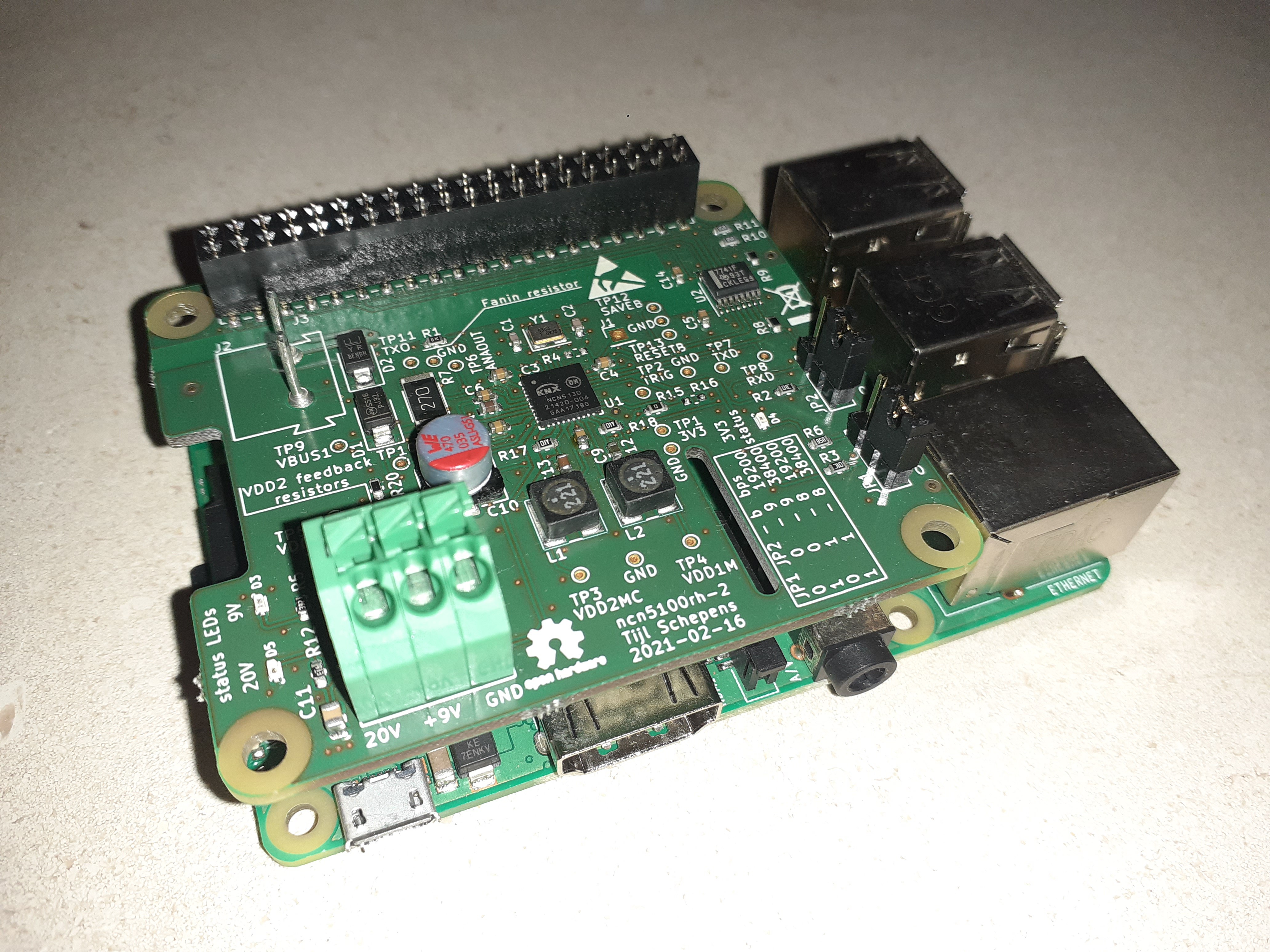
Tijl SchepensThe Raspberry Pi HAT is built around the NCN5130 transceiver from ON Semiconductor. It has a part of the MAC layer implemented, which makes it easier to develop software for it. Communication is done through either UART or SPI. Every piece of software I've seen communicates over UART, so we will ignore the SPI portion.
No isolation was used between the Raspberry Pi and the transceiver. It would increase the development effort significantly and I did not see the advantage as of now. Maybe in the future if it seems necessary it can be added, but I don't think so...
As the Raspberry Pi is the most popular SBC out there, it was easy to select it as the preferred platform. The KNXD software is also compatible with the Raspberry Pi as well as OpenHAB.
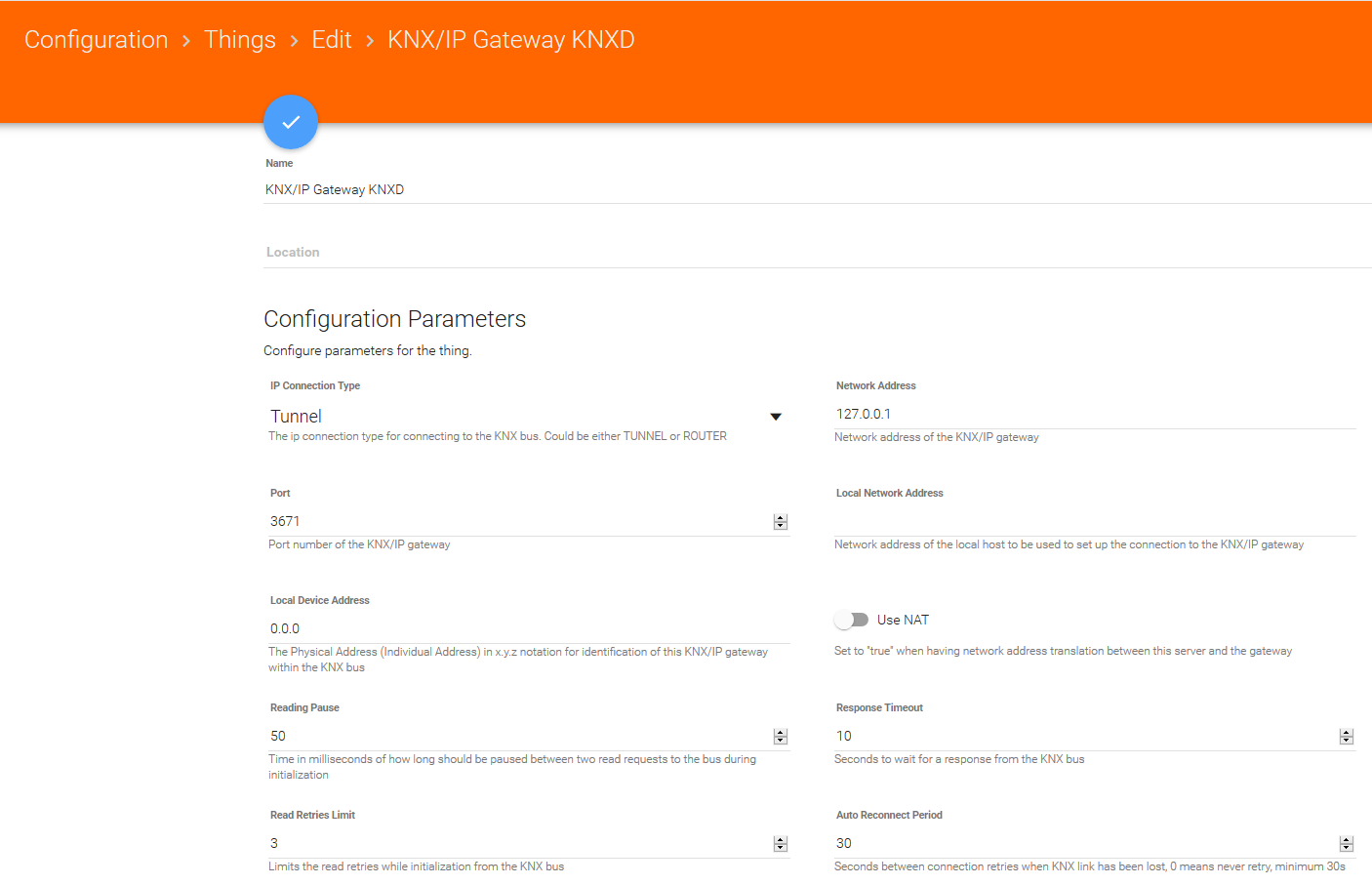
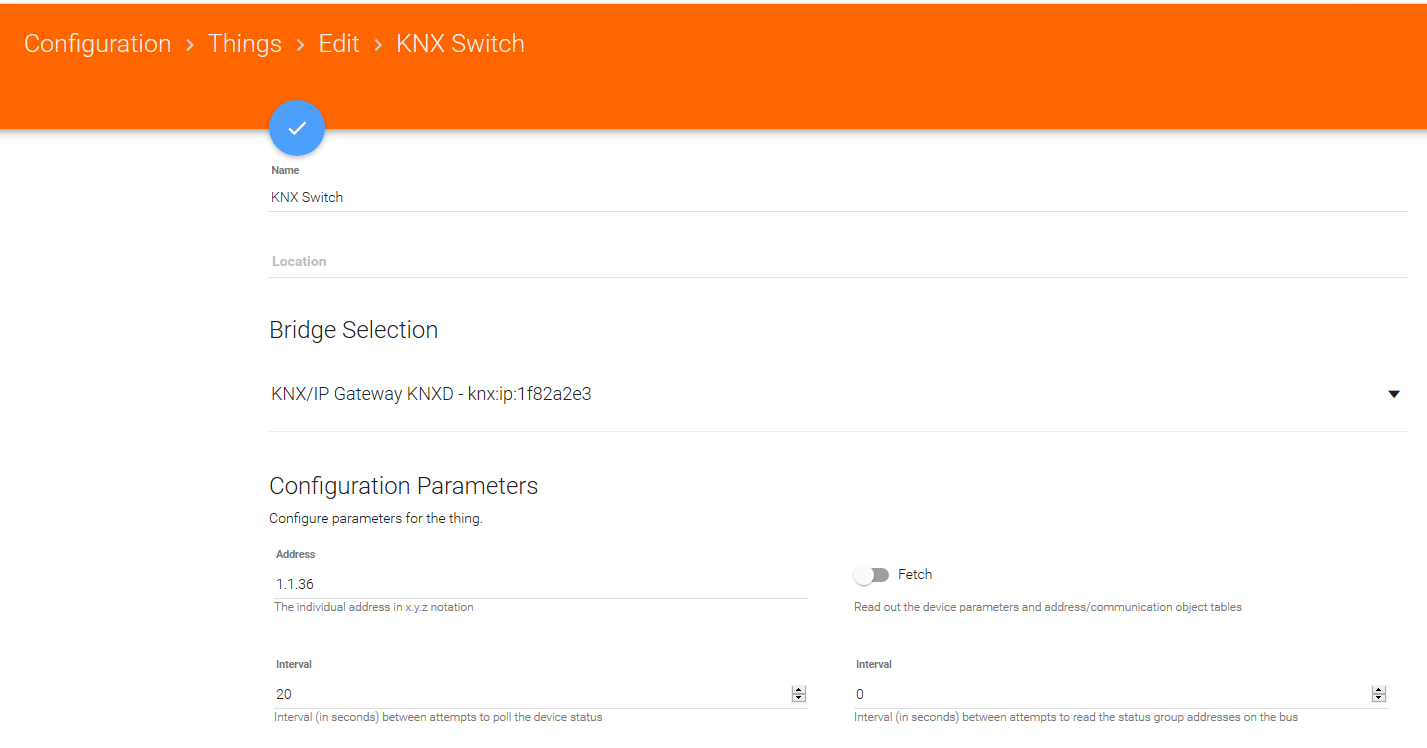
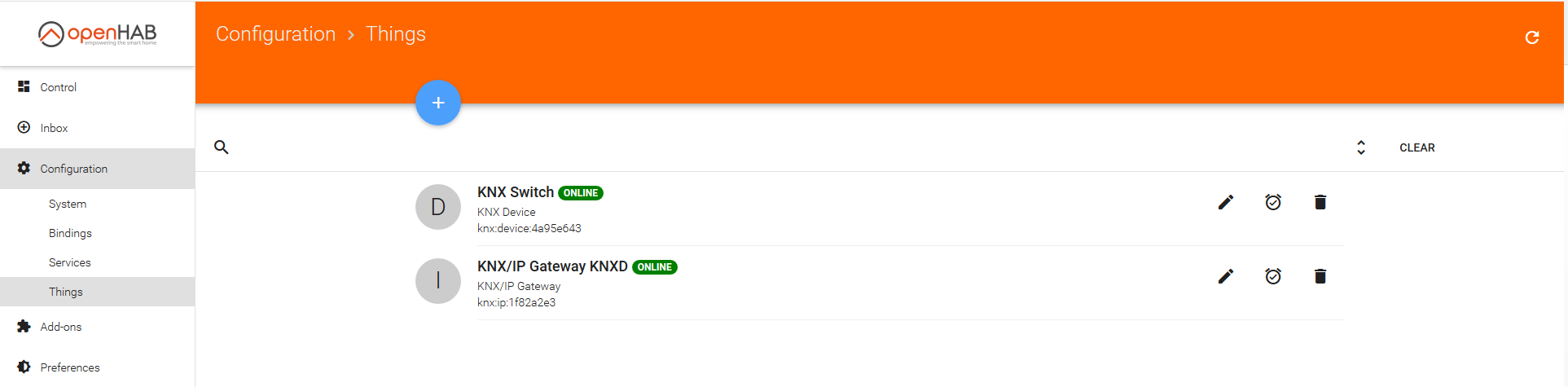
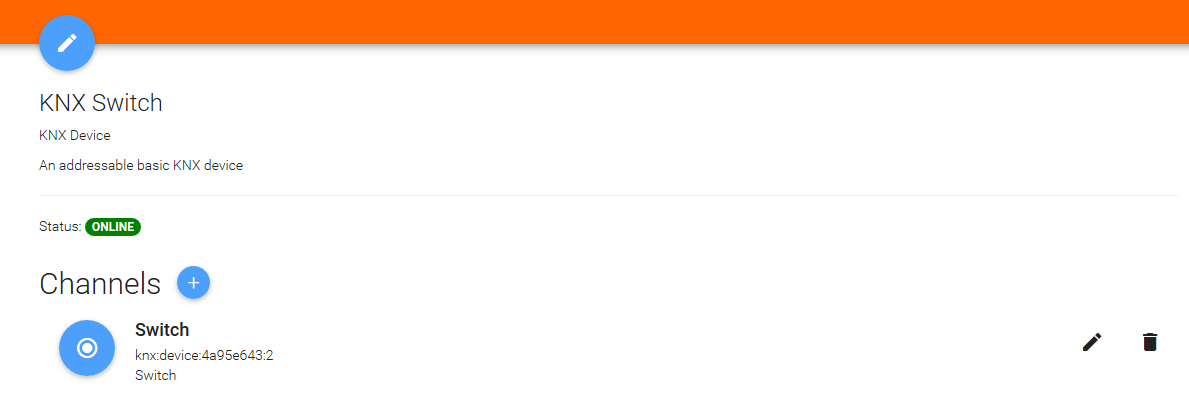
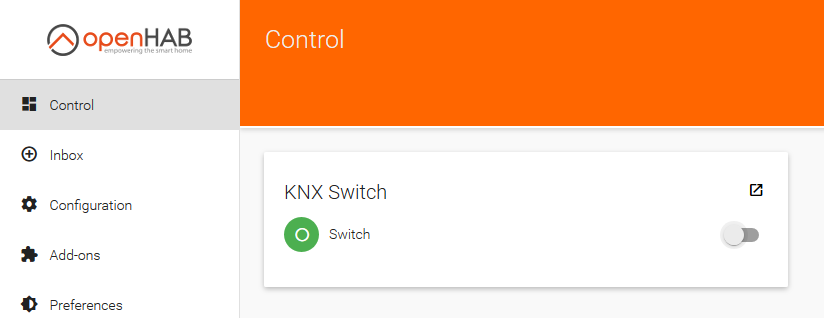
The ultimate goals is to get KNXD working with the HAT and interface OpenHAB with KNXD. This would make it possible to control stuff on a KNX network using OpenHAB.
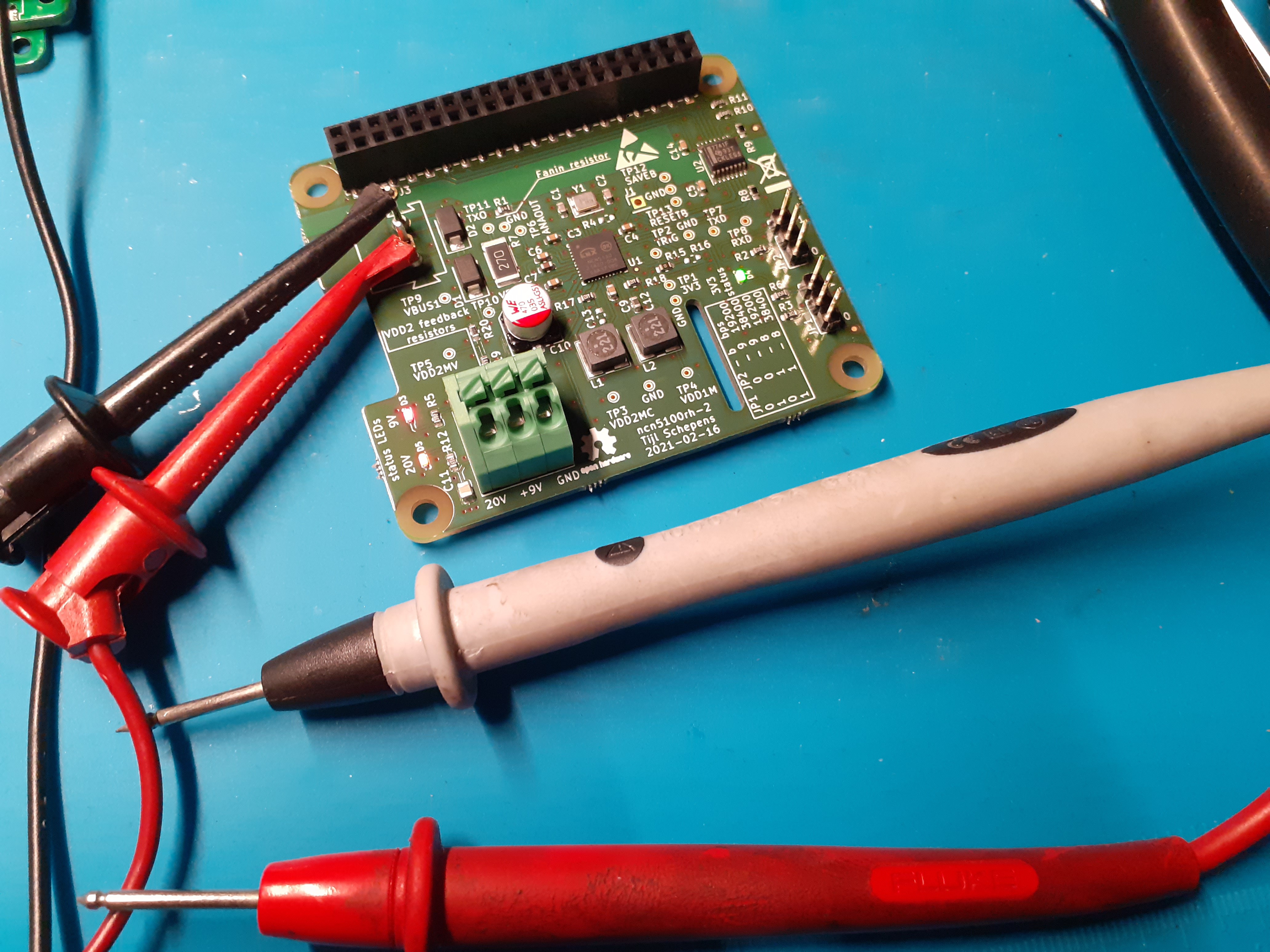
 I guess that means that I have to put the shield upside down onto the Raspberry Pi to work with it. It looks silly, but hey it works ;-)
I guess that means that I have to put the shield upside down onto the Raspberry Pi to work with it. It looks silly, but hey it works ;-)







 Psycho
Psycho
 Craig Hissett
Craig Hissett
 Ryan Walmsley
Ryan Walmsley
Hi its possible to working with Home assistant?