 Alex M Sunny
Alex M Sunny-
1Download All materials provided
The complete 3D CAD designs, circuit diagrams and arduino codes ( since we used Arduino) are provided here
-
2Mechanical Structure fabrication and Assembly
Refer the mechanical designs provided and fabricate according to the dimensions provided, we used Iron sheets for fabrication. We are also working on Aluminum sheets which are light weight and strong .
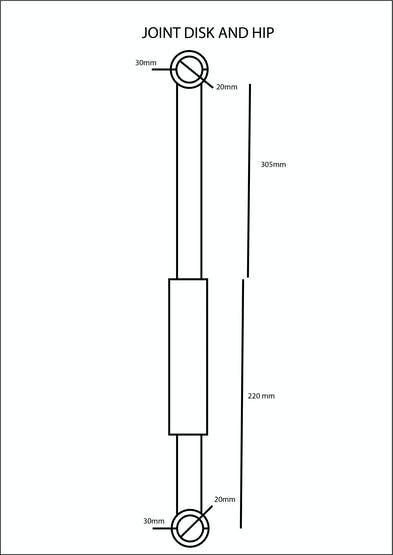
Mechanical Design
The detailed design files are attached with this tutorial as CAD file.
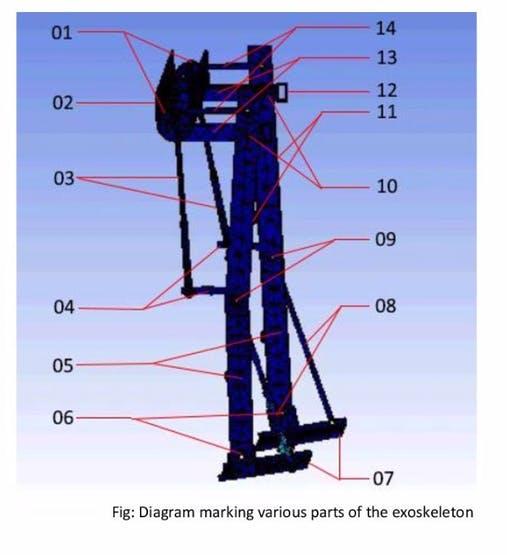
Fig 1. Diagram marking various parts of the exoskelton.
Parts Description
Parts Description
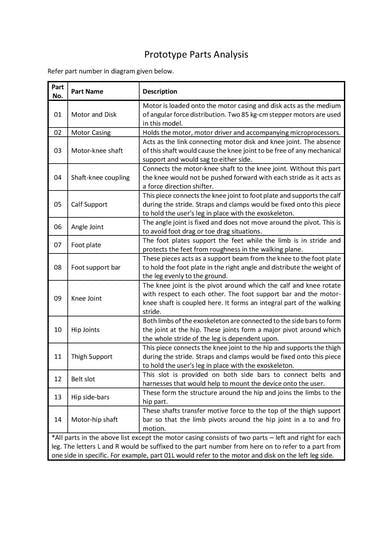
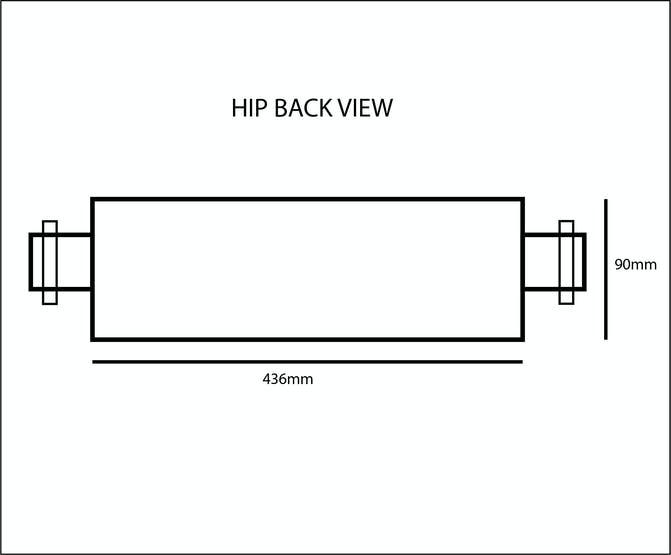
Also refer to the below images to make the mechanical structure to be connected.
The measurements and complete details are mentioned in the diagrams you can follow it and attach it together as seen in Fig 1.
You can use normal manufacturing techniques to replicate this design. You can also refer the Cad file to assemble all parts .
-
3Electronics and Motors
The electronics components in this project is available easily through online shopping sites. Gather all components, the components used are provided in the components section.
We are working on the building a PCB version so that it will help you to rebuild this project really fast and accurately .
-
4Wiring all the components and Assembling it with the mechanical structure
The basic connection diagrams and schematics are described, refer the connection diagram. After wiring attach motors and circuit diagram to the mechanical structure.
-
5Programming Microcontroller
The controller board we used is Arduino . The programming is done in the ARDUINO IDE. We have used two controllers in this project Arduino Nano (for Walker) and Arduino UNO ( for exosuit) open walker3.ino and write into Arduino Nano and unikexo.ino to Arduino UNO. We will be updating the codes ,sensors and controllers to add more stability to the system.
-
6Testing
If you find any difficulties in any of the instructions please feel free to contact us. Happy Hacking!!!
Open Exosuit for Differently Abled
This is a lower limb exoskeleton developed to aid patients with walking disabilities in their therapies and to perform simple tasks.







Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.