Youtube channel:
https://www.youtube.com/channel/UCMWuXBkdhiX_RDFE4G2DYXg
XSimulator page:
https://www.xsimulator.net/community/threads/direct-drive-stepper-motor.15204/
Motor driver:
Driver consists of an arm chip as brain and driver circuit with mosfets. It takes PWM and Dir input from usb force feedback controllers, or any other hardware, e.g. MMOS on stm32 from virtual racing or AI WAVE on arduino leonardo from racing fr, OpenFFB board from Ultrawipf or VNMwheel from HoanTV.
At this moment both steppers and brushless dc (classic Chinese servo) motors with incremental encoders are supported.





 Daren Schwenke
Daren Schwenke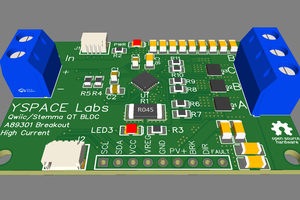
 YSPACE Labs
YSPACE Labs
 Scott Duckworth
Scott Duckworth
 John Taylor
John Taylor
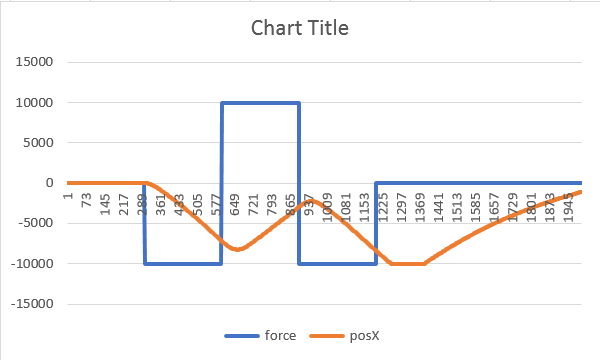
How is the stepper being driven?
My experience with stepper motors is they're applying incremental steps to lock the motor at a given output position, and to force them out of that step would be a very jerky movement, doesn't appear that's what's happening here. How do you drive it to a given amount of force without skipping steps like crazy?