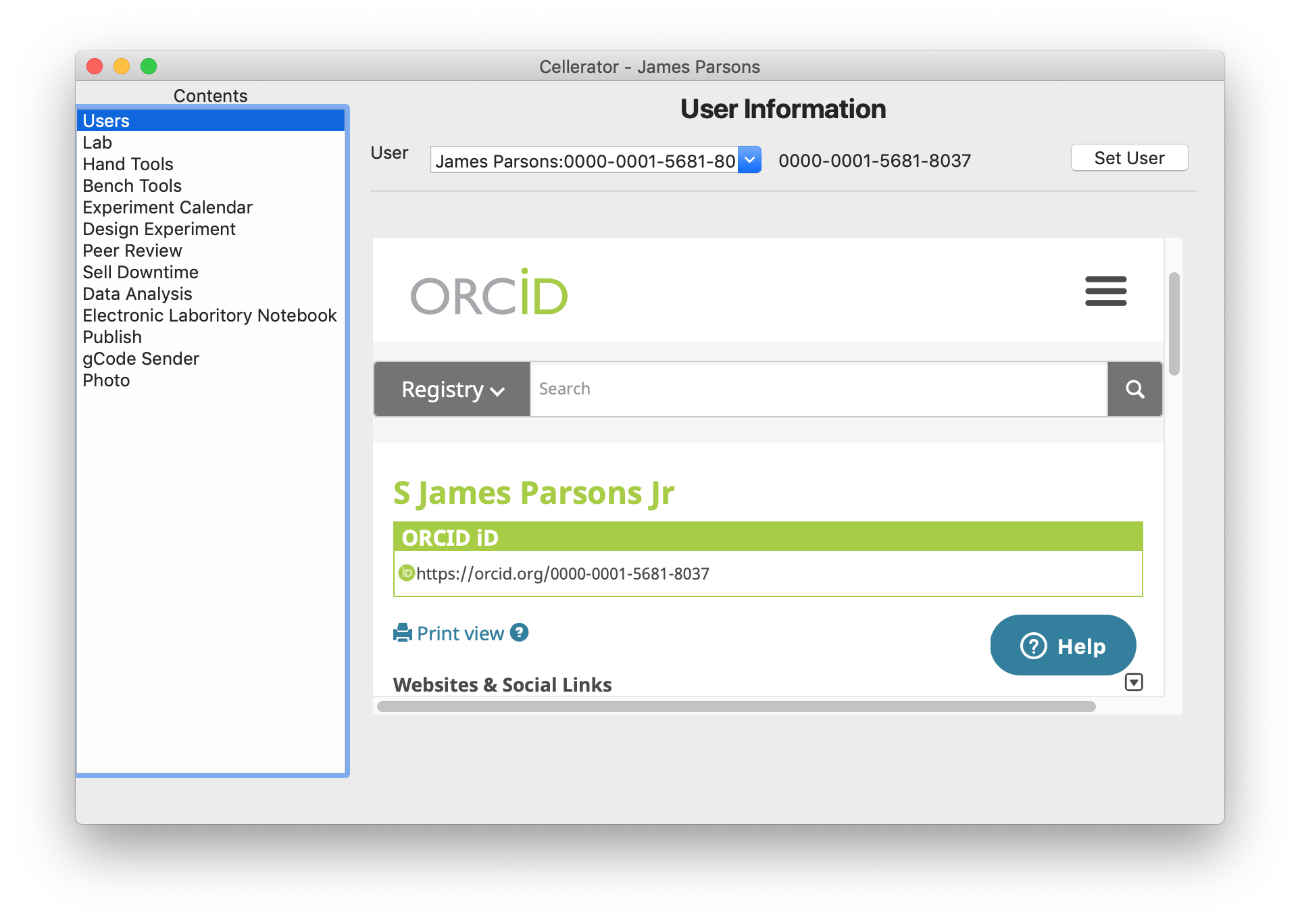
 S James Parsons Jr
S James Parsons JrComputer code has made some amazing software. Turning on 0’s and 1’s really, really fast has led to 3D animation for video games and movies, cameras can utilize computer vision to focus on faces, storing information on the internet, and self-driving cars capable of safely navigating roads.
Biology code (DNA) has made some amazing proteins. Turning DNA into Proteins really, really fast has led to spider silk proteins that are stronger than Kevlar, firefly bio-luminescent light, milk for cheeses and ice-creams, collagen that makes up skin, hormones to signal cells, enzymes to break down lipids and sugars, and DNA has created YOU!
Science and industry have harnessed the power of the protein. Spiber is making jackets out of synthetic silk. Nyoka has created a bio-luminescent glow stick. Perfect Day is working on cow free dairy and Modern Meadows is making cow free leather. Novo Nordisk creates synthetic insulin to treat diabetes. We have enzymes in our laundry detergent to break up grease, enzyme supplements to process dairy, and culinary enzymes to remove cellulose from fruits and glue meats together. Out of all the naturally occurring proteins and engineered proteins, humanity hasn’t even scratched the surface.
The personal computer (PC) brought computation power to everyone, leading to some astonishing code. I want to do the same with proteins. Just envision a world where the average person could create with proteins. I envision trillions of proteins, cleaning up toxins from the environment, RuBisCO solar panels, roads made out of self-healing bio-ceramics, designer food that is good for you and the environment, and medicines.
Harnessing the power of proteins will be the tool of the future.
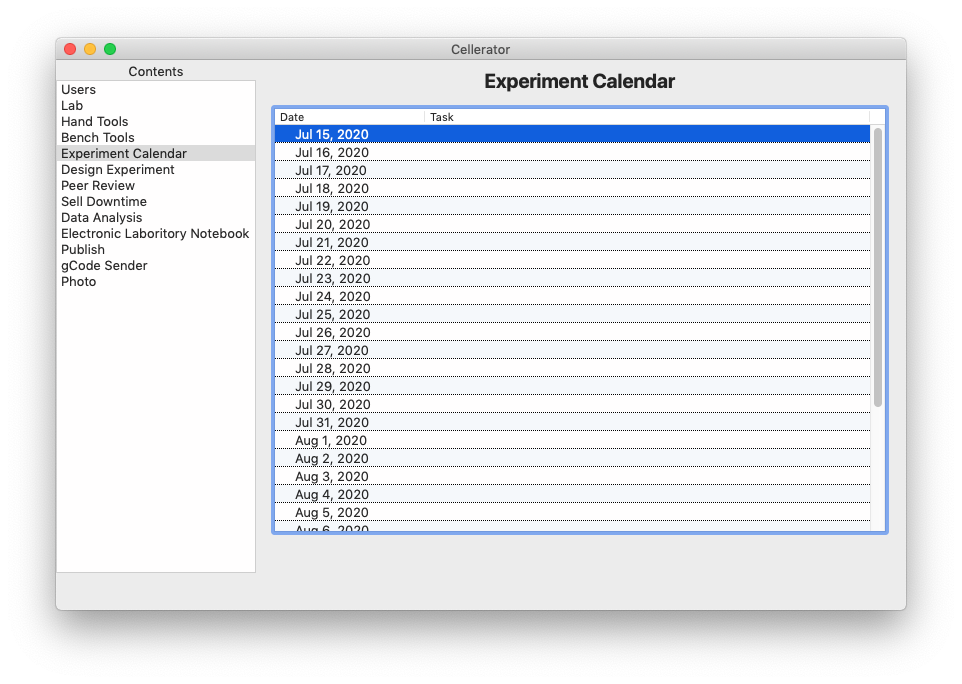
 Peer Review - A forum for discussion before, during, and after an experiment.
Peer Review - A forum for discussion before, during, and after an experiment. 




 Shebin Jose Jacob
Shebin Jose Jacob


 Jean Alinei
Jean Alinei
Good promo text up top there... but it's not obvious (at least to someone outside the biotech field, such as me) what this is and what it does or enables others to do.
Could you add a plaintext explanation that a relatively ordinary person, or a "nerd" (eg me... although TBH I'm more "dork" level at this point, LOL) with limited biotech/bio-anything/chemistry/etc understanding could pick up pretty well...?
Thanks! :)