 Jacob David C Cunningham
Jacob David C Cunningham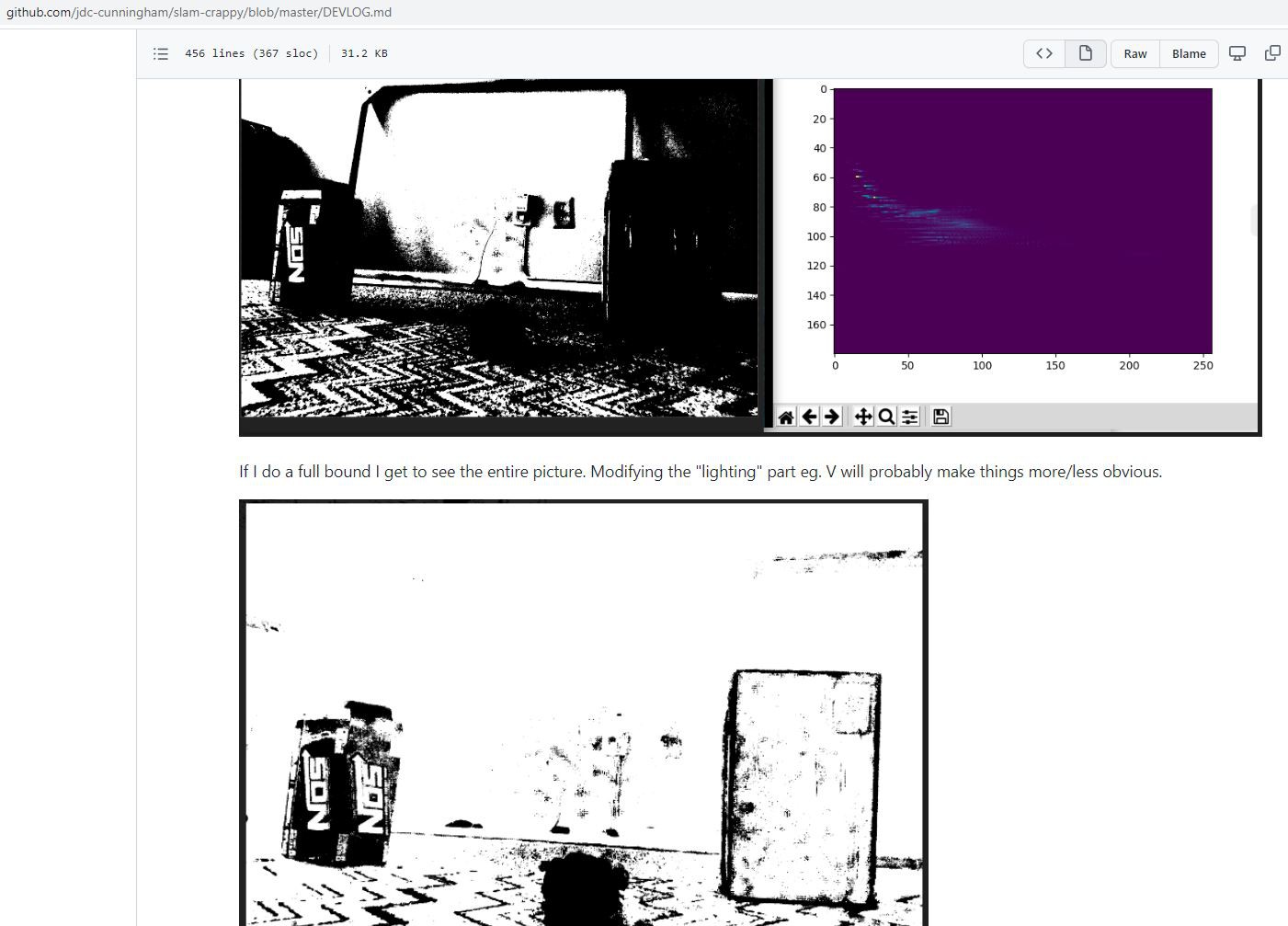
This is a late update. I have since changed the github project name to slam-crappy.
The main flaw with this design is the pan/tilt bed is not accurate due to the stiff wires of the sensors. So a future version I have in mind will use a slip ring/possibly a floating IMU unit (depends on size, channels available) and then that will be more accurate to not get stuck/fight friction.
The other issue is the method I was using (histogram and light distribution) to isolate objects for bounding. At the time I was thinking it would be an improved way to do the edge detection... but there are other technologies I've become aware of like VIO... which I'm not sure what alogrithm(s) they use to batch pixels together as a blob.
Anyway I will return to this although not sure when. My Twerk Lidar Robot's navigation system sucks, definitely want to use a combination of vision and Lidar/ToF. Stereo would be cool too.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.