 David Greenberg
David Greenberg(This is actually as-of Dec 19, 2020)
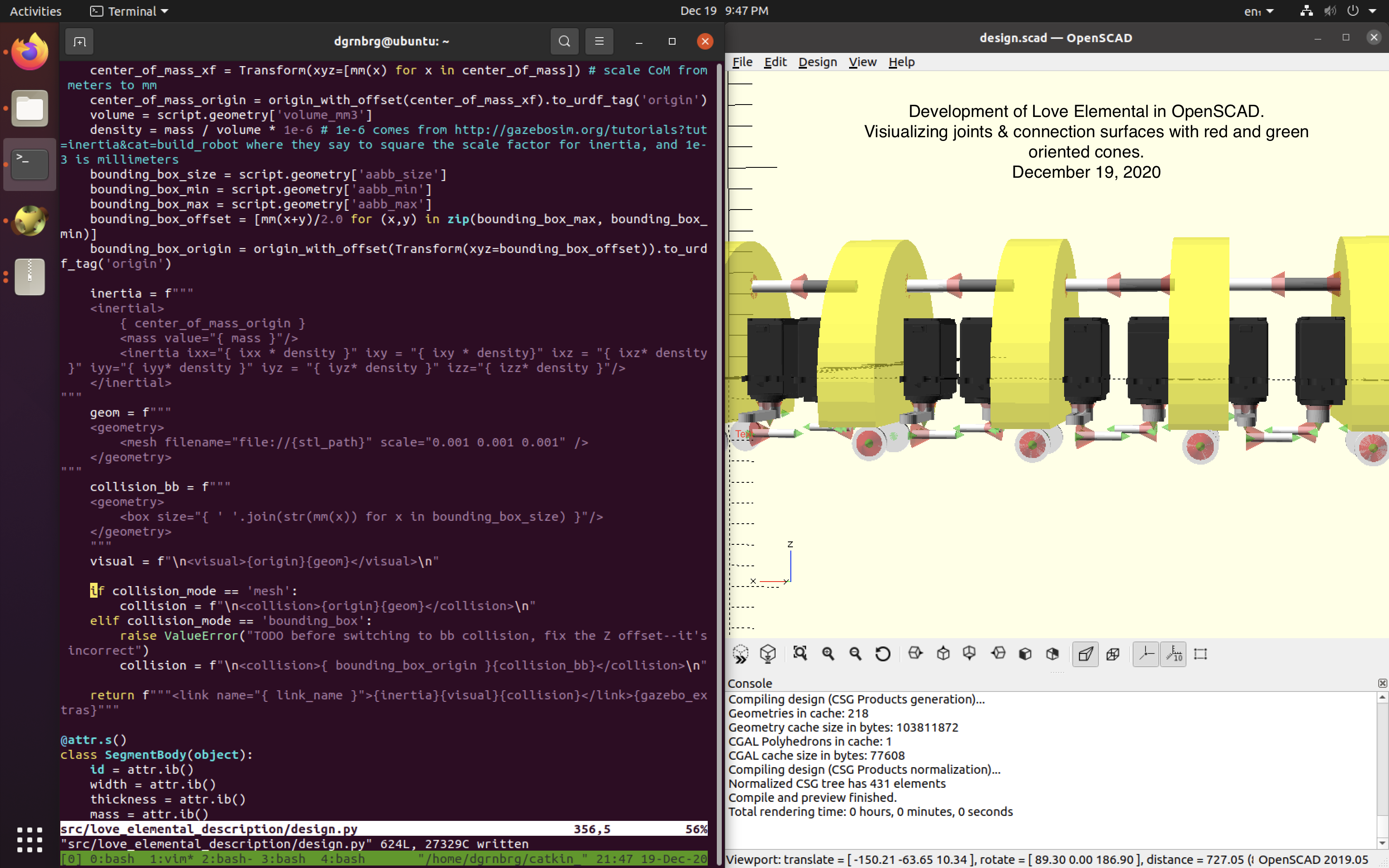
This shows the environment I created that uses python to combine openscad, step file importing, and joint definitions to export to a physics and motor-control simulation-ready model for Gazebo/ROS.
It was particularly exciting because this approach actually includes full inertial models for the entire robot, doing calculations to estimate them from the component's STEP files.
This shows a side profile of the robot at this point, highlighting all points with their orientation axis in red, and connections points to combine components (so that all calculations can be done in local frames of reference). This shows an initial design for the body segments, spine, servo motors, and wheels for the elemental. The servo models come from the vendor's step files.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.