0%
0%
Dish Rotator for NOAA images
Receiving 1.7GHz HRPT signals from NOAA satellites
 Johannes
JohannesBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 markwarren.ee
markwarren.ee
 Benjamin Prescher
Benjamin Prescher
 Zdenek Hurak
Zdenek Hurak
The author of this post is clearly an enthusiast in the field of radio technology and antenna building. Their excitement and passion for the project are evident throughout the post. Here are some comments on various aspects of the post:
1. **Excitement and Enthusiasm**: The author's enthusiasm for the project is infectious. The opening statement about purchasing a prime focus dish at a garage sale for a specific price sets the tone for an exciting adventure in antenna construction.
2. **Technical Knowledge**: The post demonstrates a strong understanding of the technical aspects of antennas, frequencies, and gain. The author's calculations about the antenna's potential performance and comparison with a yagi-uda antenna reflect their technical expertise.
3. **Project Phases**: The author has clearly outlined the different stages of their project, which is helpful for readers who might be interested in similar endeavors. This structured approach is a good practice for any technical project.
4. **Controller Unit**: The description of the controller unit shows that the author is planning to integrate various components, including a Raspberry Pi, RTL-SDR stick, and motor driver, to control the antenna. The use of a Python script and the consideration of safety features like emergency-stop and end-switches demonstrate a comprehensive approach to the project.
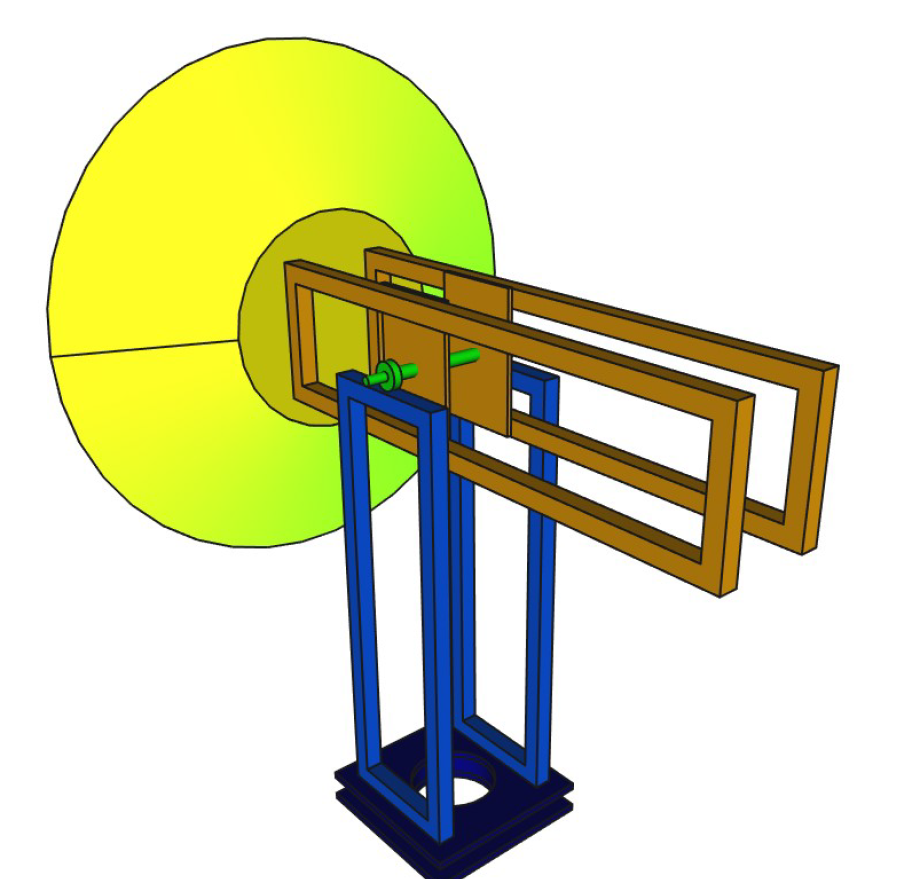
5. **Rotator**: The author's account of their trials and errors in developing the rotator hardware is relatable for anyone who has engaged in DIY projects. It also shows a willingness to learn and adapt, a valuable quality in any project.
6. **3D Printing**: The brief mention of trying 3D printing for gears and subsequently opting for solid metal gears indicates a pragmatic approach. It's important to acknowledge when a particular approach isn't working and make adjustments accordingly.
7. **Sharing Knowledge**: The author mentions the intention to share their work, particularly the Python script for rotctl_server.py. This is commendable as it contributes to the open-source and maker communities.
In conclusion, this post reflects the excitement, knowledge, and structured approach of the author in their quest to build a high-performance antenna. It's a great example of how enthusiasts share their projects and knowledge with others who share their interests.
https://cursedimages.us/chuck-e-cheese-cursed-image/